Robots Stand Out at Automatica
Suppliers from around the world displayed the latest assembly technology at Automatica 2016.

Comau showed off its forthcoming AURA highpayload collaborative robot at the Automatica show. Photo courtesy Messe München GmbH

The Co-act Gripper JL1 from SCHUNK Inc. features a flexible outer skin with curved edges, integrated protection against workpiece loss, and an LEDbased interface for communication with people. Photo courtesy SCHUNK Inc.
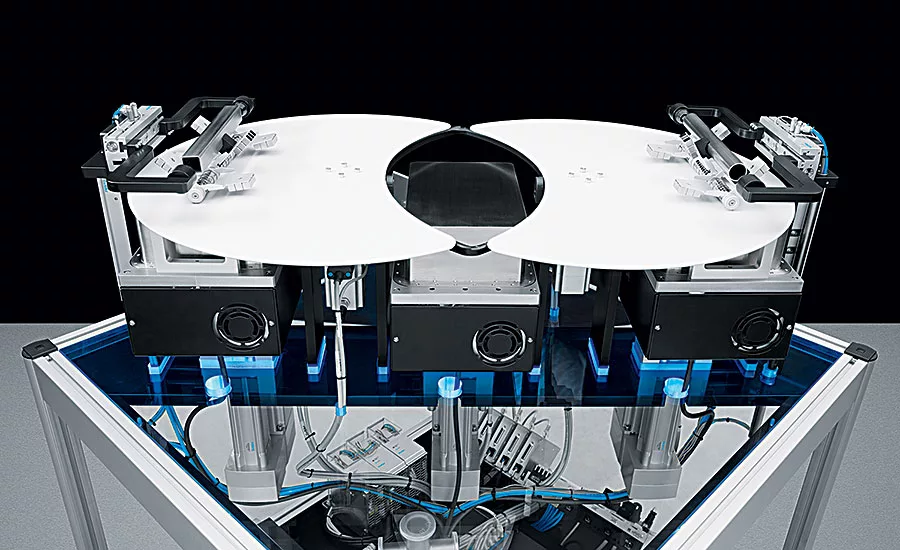
The SupraGripper from Festo has two grasping elements, each with three fingers, that hover freely above two semicircular plates. This technology could enable objects to be grasped and transported within enclosed spaces. Photo courtesy Festo Corp.

KUKA showed off its LBR iiwa lightweight collaborative robot at Automatica. Photo courtesy KUKA Robotics

Some 45,000 manufacturing engineers from around the world saw the latest technologies for automated assembly at this year’s Automatica show in Munich, Germany. Photo courtesy Messe München GmbH
Some 45,000 manufacturing engineers and managers from 47 countries attended Automatica 2016, which took place June 21-24 at the New Munich Trade Fair Centre in Germany.
Held every two years, this international trade fair brings together suppliers of robotics, vision systems, mechatronics and automation under one roof. Some 839 exhibitors from 30 countries displayed their wares in six halls encompassing more than 710,000 square feet of exhibit space.
The latest robotic technology has always been a mainstay of the Automatica show, and this year was no exception. Collaborative robots, in particular, garnered a lot of attention from engineers.
For example, Comau showed off its forthcoming AURA high-payload collaborative robot. Available in 60- and 110-kilogram payload models, the AURA (Advanced Use Robotic Arm) is equipped with force sensors under a layer of protective foam. When the AURA is touched, it stops moving. In addition, an operator can use the touch sensors as if they were buttons to direct the motion of the arm.
The AURA can see as well as feel. It is equipped with a laser scanner and vision system, which continuously transmit data regarding the proximity of people and equipment to the robot’s controller. This enables the robot to modify its trajectory to avoid collisions. Vision makes it possible to bring the motion of the robot to a complete stop only when it is very close to or actually in contact with a worker. The vision system and laser scanner also serve as backups for the touch sensors in the arm. As a result, there is no need to control vibration around the robot.
New Grippers
Several innovative robotic peripherals debuted at Automatica, too. For example, SCHUNK Inc. introduced its new Co-act Gripper JL1. Designed for specifically for collaboration between people and robots, the gripper features a flexible outer skin with curved edges, integrated protection against workpiece loss, and an LED-based interface for communication with people.
The gripper satisfies the most critical requirements for safe collaboration between people and robots: It never loses grip of an object; it always detects contact with people; and it will never cause injury when gripping.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
A safe drive provides functional safety and a wide range of gripping force. If a process is interrupted, as in the case of an emergency stop, the device will continue to reliably grip the part. If the gripper comes into unwanted contact with a person, it automatically limits its gripping force. With the help of specially designed gripping techniques and force-measuring jaws, the gripper adjusts its behavior in real time depending on whether it is gripping a workpiece or a human hand.
The device meets the DIN EN ISO 10218 safety requirements for industrial robots, as well as the forthcoming DIN EN ISO 20218 safety requirements.
SCHUNK has also designed the gripper to be used as a communication tool between the system control and the operator. LED lights and a color-coding system indicate when the automated system is ready for operation and when it has gripped the correct workpiece.
In the future, the gripper will enable complex relationships between various sensors and safety mechanisms. Force-measuring jaws and visual monitoring will be incorporated, as well as skins employing tactile and capacitive sensors or current-based force control. Just like people, who use multiple senses to evaluate a situation, the Co-act gripper will be able to collect information from several sensor sources, giving it the most accurate possible picture of reality. OPC UA interfaces will enable the gripper to communicate with the robot as well as higher-ranking plant control.
Another new gripper that debuted at Automatica is the SupraGripper from Festo Corp. With the SupraGripper two grasping elements, each with three fingers, hover freely above two semicircular plates. This technology could enable objects to be grasped and transported within enclosed spaces—a practical solution for clean rooms or for working in liquids, gases or in vacuum.
The hovering effect is generated by three cryostats, which are installed beneath the plates and can be driven upwards or downwards. The grippers thus either hover above the plates or are set down onto them. In addition, the two plates can be rotated and precisely positioned by means of two rotary drives, so that the two grippers can be transported from one cryostat to the next.
To grasp an object, electrical spools fitted to the cryostats emit an impulse, which either severs the stored connection to the magnetic gripper elements or restores them, as required. This impulse causes the individual finger elements to fold upwards or downwards, which makes the grippers open or close.
Robotics Research
Automatica was also a forum for robotics research. For example, KUKA Robotics presented three innovative corporate research projects at the event.
In Project AREUS, KUKA and its partners are developing technologies for energy-efficient, robot-based automation. In one application, which was developed in conjunction with Daimler, two KUKA robots worked on a handling and welding task in an energy-efficient manner. For the first time, the robots were operated using a controller powered by a 600 VDC network. This supplies the robots with power without conversion losses. In addition, it is easier to feed the robot’s brake energy back into the DC network, store it temporarily, or even use it immediately to speed up another robot.
In a second application, a new form of energy-efficient path planning was presented in conjunction with TU Chalmers. The application demonstrated savings of up to 30 percent in energy consumption and 60 percent in peak energy demand, depending on the task. The demonstration showed a KUKA robot executing a path first with conventional planning and then using the energy-optimized method. The energy consumption measurements for each path were then displayed in real time.
In the SMErobotics Project, KUKA is working with European partners to improve the competitiveness of small and midsized companies. One application demonstrated the automated placement of rivets for the production of grippers that can be manufactured in batch size one. This process used innovative, virtual models for simulating, planning and monitoring task execution and a new type of graphical user interface for programming and operation.
Another exhibit demonstrated the twin-arm assembly of metallic structures using two lightweight LBR iiwa robots. A person demonstrated an assembly process to the robots. The robots’ controller then automatically converted the person’s movements into an optimized robot program.
In the RobDREAM Project, KUKA demonstrated technology to help robots improve their capabilities “in their sleep.” KUKA engineers realized that periods when a robot is not active—typically at night—could be used to perform complex optimization calculations that would enable the robot to work more efficiently the following workday.
KUKA engineers used an LBR iiwa lightweight robot to demonstrate the first steps towards that goal. The robot will use a 3D camera to detect Lego bricks, pick them up, and place them in a box. The location of the box and bricks varies. During the workday, the robot figures out where the Lego bricks are kept, where obstacles are, and where the empty boxes are typically placed. In the end, the robot reaches an optimum speed of execution as a result of experimentation with different path planning algorithms and sets of parameters.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!





