Next-Gen SCARAs
Today’s SCARA robots offer speed, precision, ease of use and simple connectivity at an economical price.



Medical doctors have increasingly become specialized during the last 25 years or so. But, industrial robots have been specialists by design since they began being used for manufacturing in the early 1960s.
Each type of robot fills a particular assembly niche, and manufacturers have greatly benefitted from this approach. For example, lifting, moving and rotating large objects is best performed by a six-axis robot.
For pick-and-place applications, manufacturers rely on a delta, Cartesian or SCARA (selective compliance articulated robot arm) robot. The appeal of the latter stems from its higher speed and X, Y, Z and rotary motion.
“The SCARA is a great gateway robot for manufacturers, especially for those that need a robot to perform high-speed pick-and-place,” says Ryan Guthrie, technical and application support manager at TM Robotics (Americas) Inc. (TMRA), the American and European distributor of Shibaura (formerly Toshiba) Machine robots. “This type of robot is also easier to use and maintain than a six-axis model, and it continues to come down in price, often below $10,000. Is it any wonder that some manufacturers buy SCARAs by the hundreds?”
TMRA offers four families of Shibaura Machine SCARAs, including the THL series of medium-duty robots. Some years ago, gripper manufacturer Grabit Inc. mounted a custom gripper to a THL1000 robot for the Stackit auto-layering robot system used by Nike to significantly increase shoe productivity.
The gripper features a flat pad of electrodes that generate positive and negative charges, thereby creating an electric field that adheres to surfaces as diverse as leather, mesh and composite fibers. This capability enables the SCARA robot to stack up to 40 pieces of material for a shoe upper—the flexible part that sits on top of the foot—in only 50 to 75 seconds and manufacture 300 to 600 pairs of gym shoes in an eight-hour shift. Arranging the layers manually can take up to 20 minutes.
The standard THL1000 model offers a maximum payload of 10 kilograms against a total mass of 37 kilograms, and a cycle time of 0.48 second with a load of 2 kilograms. For the Stackit machine, however, Grabit had TM Robotics provide a robot with a custom gear ratio for enhanced payload capability.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
Accuracy, quickness and smooth motion have made SCARAs a favorite of manufacturers for a wide range of applications since the early 1980s. Ease of use, simple connectivity, high reliability and a small footprint have further increased the robot’s appeal in recent years.
Axes in Action
SCARAs usually have four axes of motion, although several suppliers have begun offering three-axis and two-axis models as well. On the standard four-axis unit, the first two axes are radial joints in the horizontal plane. These allow the arm to swivel about its base and fold in on itself like a folding screen. The third, or Z, axis produces vertical motion, while the fourth, or Θ, axis produces rotational motion around the Z axis.
Three-axis SCARAs eliminate the rotational axis to provide a larger allowable inertial load moment. Two-axis models, which are offered by some Asian suppliers, are designed for simple side-to-side and in-and-out-arm-movement processes, such as loading or unloading parts or installing a fastener.
“Screwdriving is a common application for three-axis SCARAs,” notes Scott Marsic, group product manager of robotics at Epson America Inc. “J4 rotation is removed, and a screwdriver is mounted on the arm.”
Speed and precision are the two main benefits of SCARAs relative to other robots. The standard cycle time for any small robot is defined as the time needed to move 1 inch up, 12 inches across, 1 inch down, and back again. IAI Corp. says that its high-speed IXA-NSN SCARA robot can complete this standard move in 0.26 second, with a continuous cycle time of 0.45 second. No six-axis robot can move this fast because it has more motors to coordinate.
As for precision, SCARAs excel when they pick something up with a straight vertical motion, transfer it horizontally, and place it back down with a straight vertical motion, without tilting the part. Manufacturers are increasingly using SCARAs with machine vision, thereby enabling the robots to quickly scan randomly placed parts on a moving conveyor and accurately identify those with defects or in the proper orientation.
The working envelope on most SCARAs may be described as a heart or kidney-shaped prism, with a circular hole passing through the middle. This allows a large area coverage in the horizontal plane but relatively little in the vertical plane.
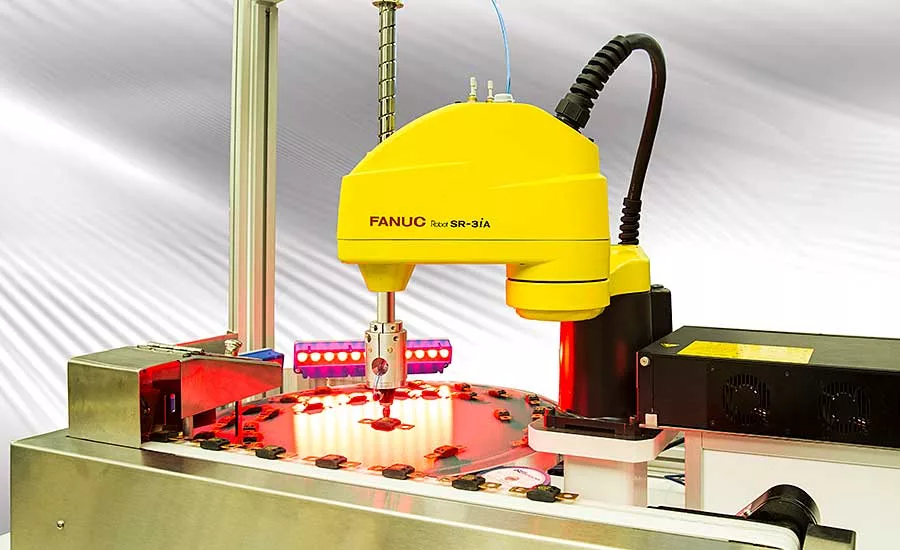
In contrast, all SR series SCARAs made by FANUC America Inc. have a 360-degree work envelope. The robots’ slim and compact design eliminates the dead zone in the back so the SCARA can reach very close to its base, explains Ed Roney, national account manager at FANUC.
“Integrators and manufacturers were happy to see us introduce the SR series in late 2017, and it’s consistently grown in popularity ever since,” says Roney. “The SCARAs further complete our line of robots, which handle a payload breadth from 0.5 kilogram to 2,300 kilograms.”
Six models make up the SR series, including three- and four-axis models with a payload of 3 (3iA) or 6 (6iA) kilograms. The 12-kilogram SCARA (12iA) and 20-kilogram (20iA) SCARAs are four-axis models that come in standard and optional environmental versions. They were introduced in 2019.
Roney says the Z axis, or quill, is sturdy on all the robots, and features a hollow center—14 millimeters in diameter—to allow passage of air and electrical lines. He notes that the environmental versions are painted white, waterproof rated to IP65 and come with a bellows cover.
Another standard feature is the SCARA iRProgrammer software interface. Roney says it enables easy robot programming with tablets or PCs, and can be accessed via a Web browser. Integrators and end-users can program the SCARA by communicating with it through a standard HTML5 browser.
All FANUC SR robots are powered by the compact R-30iB controller, which uses high-performance hardware and advanced network communications to control all motion functions. These include integrated iRVision, force sensing and conveyor tracking.
There are a couple limitations to SCARAs that manufacturers need to remember. One is reach. Because the arm is essentially a lever, its joints are load points that need robust bearings and high-torque motors to handle the loads when the arm is extended.
Another is the pedestal onto which the robot is mounted. If the pedestal creates an obstruction during part movement, a SCARA robot may not be the best option for the application.
Ever-Growing Market
“Although SCARAs are an established technology, their usage for assembly is still on the rise,” notes Marsic. “The main reason is the miniaturization of parts and products, especially in medical devices and consumer electronics. SCARAs are great at picking up, moving and placing medical components, like vials, as well as parts on PCBs and miniature Bluetooth headsets.”
Automotive and aerospace manufacturers also regularly use SCARAs, according to Marsic. The robots are ideal for handling small components like hydraulic valves used in vehicles, and moderate to large injection-molded parts.
The entire LS-B lineup from Epson, including the LS3-B and LS20-B SCARA robots, feature Quartz MEMS technology, a hardware and software system that combines vibration feedback and position for improved servo performance and reduced residual vibration. The robots also have a top-of-arm electrical and pneumatic layout with screw holes to mount additional equipment and enhance usability.
A battery-free encoder eliminates the need for users to halt the system to swap out batteries. This becomes a big advantage if several robots are simultaneously working on an assembly line.
Another helpful design feature is a low-profile cable duct for hard-to-reach workcell layouts, which contributes to the robots’ overall compactness. A built-in camera cable allows for easy vision system setup.
The LS3-B has a payload of 3 kilograms and a 400-millimeter reach, while the LS20-B has a 20-kiliogram payload and a reach of either 800 or 1,000 millimeters. ISO 4 clean room models are also available. The robots are compatible with the RC90-B controller that can be used for both PNP and NPN wiring configurations.
Epson’s T3 all-in-one SCARA has many of the same features, such as the battery-free encoder and low-profile cable duct. It also has a controller built into the robot’s base, which eliminates the need for a separate control cabinet, control box, or to run cables from the controller to the robot.
An on-board I/O communications port further increases functionality. This provides a direct connection to the controller and includes power for the end-of-arm tooling, making it easier to connect cables to the end effector and supply power to it.
The T3 plugs into a standard power receptacle and runs on 110 or 220 volts. It also offers easy-to-use setup and operation through the RC+ development environment, and has a low starting price of $7,495.
Shibaura Machine designed its THE series of SCARAs specifically for electronics manufacturers, and they have responded positively over the past two years, says Guthrie. Model THE400 handles a maximum payload of 5 kilograms, and is capable of a cycle time of only 0.39 second with a 2-kilogram load. The robot has a 400-millimeter maximum reach and works with the company’s TSL3000 external controller.
Model THE600 handles a maximum payload of 12 kilograms, and is capable of a cycle time of only 0.3 second with a 2-kilogram load. It has a 600-millimeter maximum reach and works with the company’s TS5000 external controller.
“The TS5000 controller offers next-generation capabilities, including advanced synchronized control, tracking precision and IIoT-ready data communication,” explains Guthrie. “It also has edge-computing protocols that work with artificial intelligence and vibration-analytic tools for predictive maintenance to help manufacturers reduce downtime.”
Large SCARA robots are designed to move payloads of 7 to 20 kilograms a distance of 750 to 1,000 millimeters. Several years ago, end-of-line-packaging specialist SVZ Maschinenbau GmbH integrated six Staubli TS-80 SCARA robots into a custom system for a well-known German food manufacturer.
Equipped with SVZ-developed vacuum grippers, the robots pick up empty plastic containers of one color from carton A and place them into carton B with containers having different color packaging.
Tip-Top Performance
Here are four things end-users can do to optimize the performance of SCARA robots, according to suppliers.
- Properly locate the robot in the work cell. A SCARA robot should always be positioned so the bulk of the workload is shared on both joints rather than one joint. Doing this maximizes the robot’s composite speed for shorter cycle times. Proper robot location also ensures that its arm does not fully extend each cycle, resulting in longer wear life.
- Make sure that the SCARA has the proper load capacity for the application. The payload capacity needs to be large enough to handle the part, as well as the weight of the end-of-arm tooling. Having a payload with a little extra weight allowance is not a bad thing.
- Only obtain performance data that is actionable. An HMI can keep track of many types of data, but how much of it is truly important? Thin out the code used by the interface to save bandwidth for the most important calculations and data for higher production and more efficient operation.
- Do all robot programming on a PLC, instead of the robot itself. This approach not only lets the robot focus only on moving the part from point A to point B. It also allows plant-floor personnel familiar with PLCs to develop and support robot applications without being robot experts.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!





