Technical University of Munich Races Into AV History



In late October, nine teams of college students representing 21 universities from around the world descended on the Indianapolis Motor Speedway to compete in the Indy Autonomous Challenge (IAC). The event attracted engineers from as far away as Hawaii and South Korea.
The list of participants included top-notch American engineering schools, such as the Massachusetts Institute of Technology, Purdue University and the Rochester Institute of Technology. However, despite Yankee ingenuity, they were beaten across the finish line by several upstart competitors from overseas.
The Technical University of Munich (TUM) was the overall winner of the event, capturing a $1 million grand prize. Second place went to EuroRacing, a joint effort from Italy, Poland and Switzerland representing the University of Modena and Reggio Emilia, the University of Pisa, ETH Zurich and the Polish Academy of Sciences.
The IAC was not a traditional head-to-head race. Instead, it resembled more of a time trial, with only one car allowed on the track at a time. Each team was required to compete in a fastest-lap competition that included an obstacle avoidance component. TUM recorded the fastest two-lap average speed of 135.944 mph on the world-famous 2.5-mile oval race track.
“We’re totally thrilled by the results,” says Alexander Wischnewski, team leader of TUM Autonomous Motorsport. “Our objective was to break 124 mph, and we did that.
“Participating in the Indy Autonomous Challenge allowed our team to advance autonomous driving technology,” claims Wischnewski. “Being able to take first place after two years of hard work acknowledges that we had an outstanding team. Our next goal is to win a high-speed autonomous head-to-head race.”
According to Wischnewski, the IAC prize money will go toward supporting the university’s efforts to further autonomous technology research and development.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
“The race let us test and optimize an autonomous vehicle’s rapid reactions to unpredictable events taking place at high speeds,” Wischnewski points out. “This brings us a big step ahead in the development of autonomous vehicles which are safe in street traffic.”
Over the past century, auto racing has traditionally pushed the envelope and resulted in many types of passenger vehicle improvements. Wischnewski believes TUM’s participation will play a similar role and contribute to advancements in AV technology.
“We believe that autonomous auto racing is an enabler for solving several of the challenges associated with the so-called ‘edge cases’ in autonomous vehicle development,” says Wischnewski. “If you can drive in this highly uncertain environment of multi-vehicle racing, you learn a lot about the design of algorithms required to handle unforeseen situations in everyday traffic, even though these might have completely different characteristics.
“The control of vehicles at the limits of the physical capabilities in every corner helps us to understand what is needed to build the next generation of vehicle safety systems, including features such as autonomous evasion maneuvers in situations where an emergency brake might not be feasible anymore,” explains Wischnewski.
“The Indy Autonomous Challenge placed tremendous demands on vehicles,” adds Wischnewski. “In contrast to normal street traffic, there are practically no rules, which means the behavior of the other vehicles is very hard to predict. At speeds of up to 300 kilometers per hour, the software has to react to changes extremely quickly.”
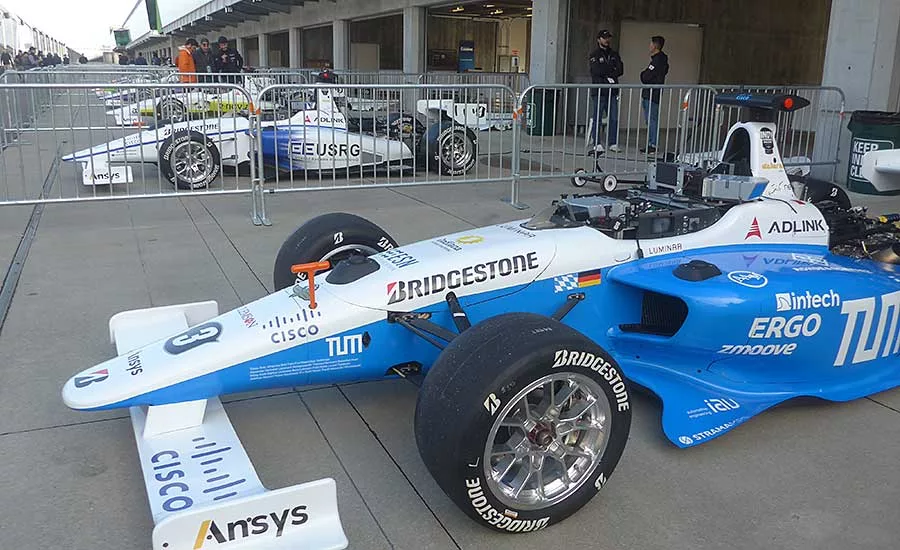
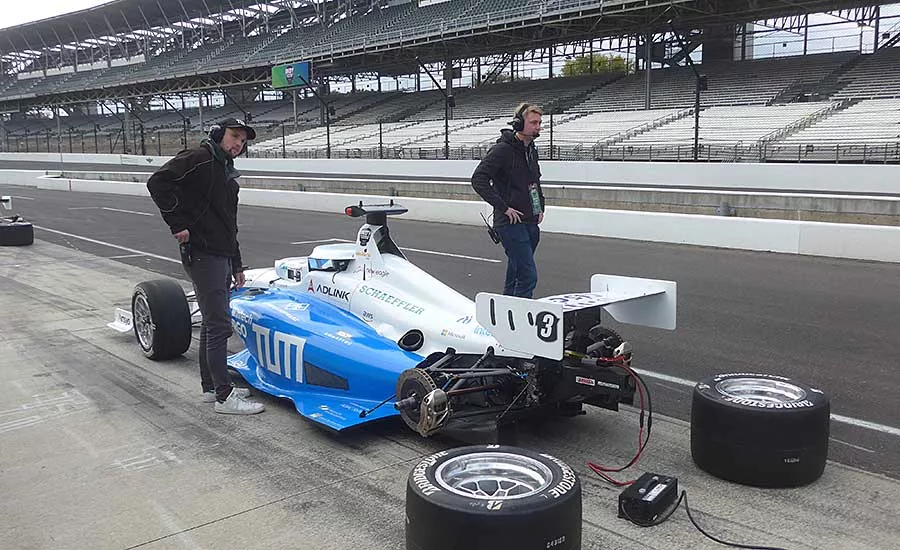
The cars used for the IAC competition were modified Dallara chassis retrofitted with hardware and controls to enable automation. They were controlled by state-of-the-art artificial intelligence technology and advanced driver assistance systems.
According to Wischnewski, removing the driver from the cockpit had a big effect on all aspects of the car, including the gearbox, which required changes related to clutch control, gear ratios and gearshift.
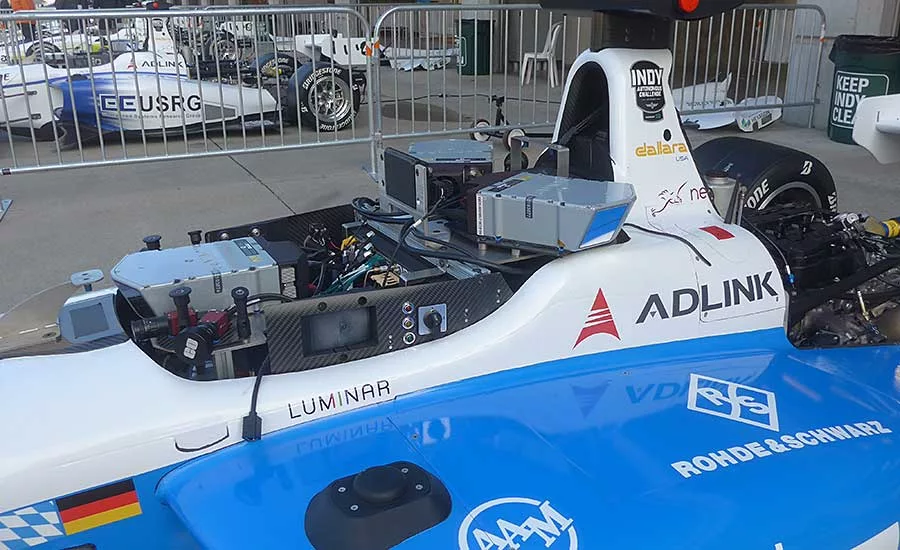
“In just a fraction of a second the on-board computer captures and analyzes all the information supplied by the car’s cameras, lidar sensors, GPS receivers and radar sensors,” says Wischnewski. “It then uses the data to make predictions…so that decisions can be made and passed on to the steering and braking systems as driving commands.”
Approximately 60 students majoring in automotive technology, automatic control and mechanical engineering at TUM worked for more than one year on the IAC project, focusing their efforts on a software architecture that could safely and quickly master these challenges.
“[Our] software development workflow is built upon an agile mindset,” explains Wischnewski. “[We] put a lot of effort into developing a realistic simulation environment well in advance of the first real-world tests.
“We put a lot of time and energy into simulating the race car and the race course,” says Wischnewski. “One major challenge was the task of digitally simulating the optical cameras and lasers.”
Wischnewski and his colleagues also simulated races with as many as eight autonomous race cars. “The virtual races made it possible for us to recognize and correct a lot of errors in advance,” he points out. “This also gave us an advantage, since transferring the software to the real car was not a big issue.”
TUM plans to participate in a head-to-head autonomous race this month at the Las Vegas Motor Speedway. The Autonomous Challenge @ CES will take place on Jan. 7.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!






