Maintaining Control in Vertical Ballscrew Applications
A spring-engaged, air-released servomotor brake can prevent back-driving of a ballscrew in vertical motion applications.

This ballscrew brake is spring-engaged. In the event of a power loss, it will automatically engage the load. Power must be resupplied to release the brake from the load. Photo courtesy Nexen Group Inc.
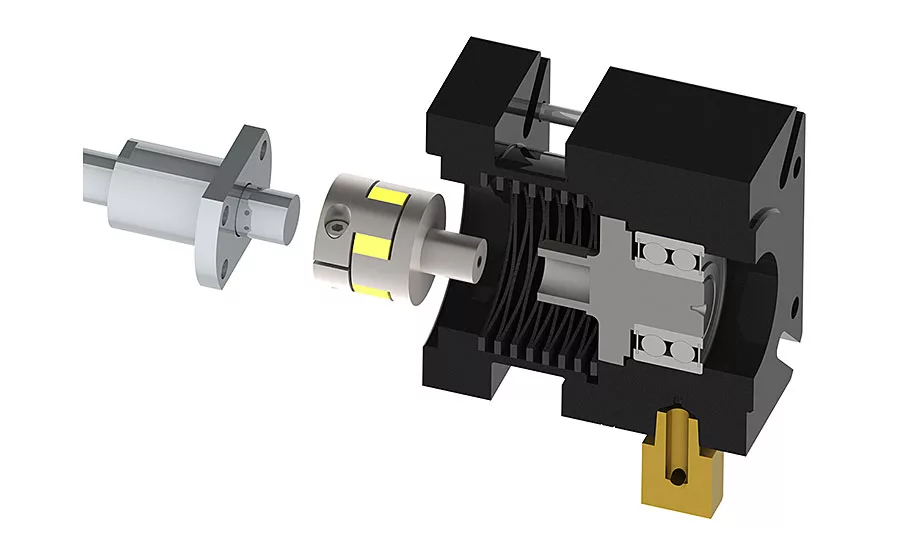
A ballscrew brake is attached to the end of a ballscrew with a coupling that can compensate for a small amount of axial misalignment. Photo courtesy Nexen Group Inc.
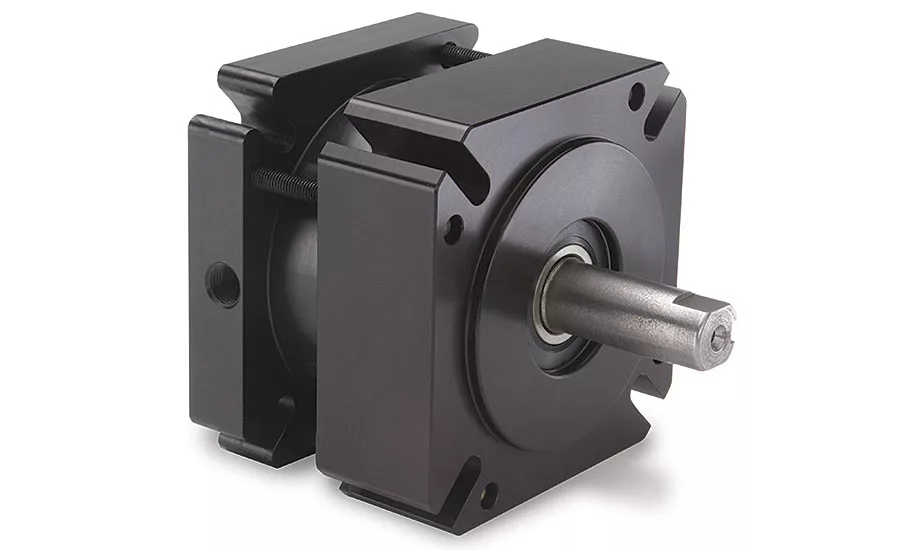
In some vertical lift applications, a servomotor drives the ballscrew. A flangemounted servomotor brake, installed between the motor and the lift flange, will hold the ballscrew and prevent back-driving. Photo courtesy Nexen Group Inc.
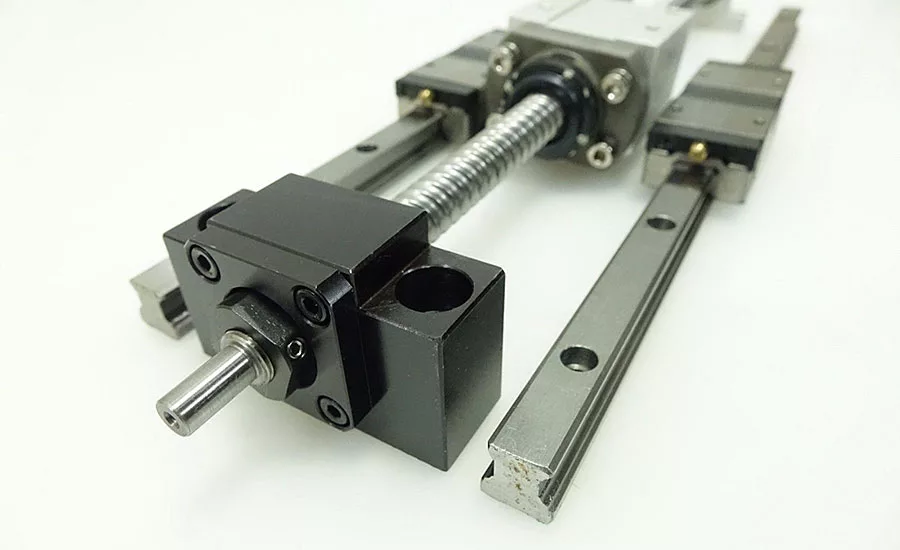
High-efficiency ballscrews will back-drive in vertical lifting applications, necessitating a brake to hold the load. Photo courtesy THK
High-efficiency ballscrews are ideal for precise, high-speed linear positioning. However, back-driving can be an issue, especially if the ballscrew is in a vertical position. If the ballscrew is not held properly, the load could drop quickly and cause damage to the payload, machine and workers.
To prevent that from happening, engineers have several options. One way is to use counterweights placed over cable pulleys to offset the weight of the load carried on the ballscrew. This design is not ideal. It takes up space, has a lot of components, and does not apply a holding force directly on the ballscrew.
Hard stops are another option, but they can damage the ballscrew if not installed properly or controlled correctly. A hard stop creates a high-force contact load that can deform the ball threads, compromise the strength of the ball bearings, damage the return system, and jam the ball nut onto the screw.
A third option is lock springs. These are inserted into the gap between the ball nut and the ballscrew. If the balls are severely damaged, the free space will be taken up by the lock spring. The increased friction created by the spring prevents the load from free-falling or back-driving the screw.
Another method is to employ mechanisms, such as clamps or caliper-style brakes, to jam against the screw. This method is somewhat effective, but it can damage the ballscrew and degrade its accuracy. These designs also take up a lot of space.
An overrun, or dog, stop prevents damage by accidental overrun at either end of the ballscrew. However, dog stops cannot be relied upon for primary protection. This type of stop should only be used as redundant protection. The travel should be stopped by the control system of the assembly, and it needs to be held by a power-off brake, such as the ballscrew brake. Most linear actuators use brakes on the motors or slides. These brakes are mounted on double-shafted motors or on the shaft supporting the pulley.
Designing Vertical Motion Systems
One of the more common mistakes in motion control occurs when designing ballscrew- or belt-driven actuators into vertical applications. Typically, both systems have a mechanical efficiency of 90 percent. In case of a power loss, the motor has no holding torque, which causes the load to come crashing downward.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
Back-drive torque, Tb, can be calculated as Tb = PLe/2π, where L is the screw lead (in inches), P is the load in pounds, and e is a mechanical efficiency constant.
Some inherent friction in the system can hold light loads, but rodless actuators will typically back-drive with even a small amount of force. The factors that resist back-driving are mechanical inefficiencies (including opposing applied forces on the load); static friction in the bearings and drive system; reduction inefficiency (from the timing belt or gears); and the torque needed to turn the shaft by hand when the motor isn’t powered.
The pitch of a screw-driven system also contributes. A ballscrew with a pitch of 2 revolutions per inch has a lower back-drive than one with a pitch of 5 revolutions per inch. This is because the relationship of frictional torque to axial holding force is F = 2πTfp; where Tf is the frictional torque and p is the ballscrew’s pitch.
If the power fails, these system inefficiencies will resist the load’s inclination to back-drive. But, if the load is heavier than these resistive factors, it will fall uncontrollably.
One way to prevent that is to place a brake on the motor or ballscrew. Such brakes are spring-engaged, meaning power must be supplied to release the brake from the load (or, conversely, the brake automatically engages the load in the event of a power loss).
A spring-engaged, air-released servomotor brake works well, but there is one problem: Thermal expansion of the ballscrew can adversely affect the brake bearing. In addition to any ambient heat the ballscrew is exposed to, the screw itself generates heat due to friction. Together, that heat can cause enough thermal expansion in the screw shaft to affect its accuracy and performance. Every degree of temperature rise causes the ballscrew shaft to expand 12 microns per meter of length.
The axial forces created by thermal expansion of the ballscrew can be large enough to preload the brake bearing and cause the device to fail prematurely.
To solve that problem, Nexen has developed a spring-engaged, air-released servomotor brake made specifically for ballscrews. Our device incorporates a backlash-free elastomer coupling that compensates for up to 2 millimeters of axial misalignment. The coupling is fixed into the brake bore with an expanding cone shaft. The other end of the coupling has a clamping hub that attaches to the ballscrew.
Application Examples
There are myriad applications for vertically mounted ballscrews, including positioning systems, clamping systems, test and inspection equipment, accumulators and separators, and pick-and-place systems.
One customer needed a spring-engaged, air-released brake with enough torque to hold an 885 pound load on a plastic thermoforming machine. The original spring-engaged, electrically released brake could not hold the load, which was driven by a servomotor and a ballscrew 30 millimeters diameter.
Our spring-engaged, air-released brake supplies 125 newton-meters of holding force. The brake attaches to the nondriven end of the ballscrew with a unique, elastomer insert coupling. The coupling consists of two halves. One half has a clamping hub and radial screw that attach to the ballscrew. The other half has an expanding shaft and tapered clamping element for attachment to the brake bore. This design enables the coupling to absorb any axial misalignment created by thermal expansion of the ballscrew.
The brake’s unique friction interfaces produce high torque relative to its size. The ballscrew brake is also a true, zero-backlash device. Zero backlash is important in many applications for accurate positioning and preventing the motor from producing free-wheeling rotation of the ballscrew.
In addition, air-released brakes have the advantage over electric brakes because no power is consumed while the brake is disengaged. That means air-released brakes are more energy efficient. They only use about 1.2 watts to power the pneumatic control valve. Electric brakes use a coil to keep the brake disengaged, consuming power and creating heat inside the brake. Excess heat detracts from the brake’s holding capacity.
Precision ballscrews are often used on CNC machine tools and provide the accuracy needed for quality machining. Such ballscrews meet the demands of a wide range of machine tool applications, including grinding, drilling, and milling. A recent application required a brake to mount directly onto a spindle drive for safety reasons. Initial installations used brake motors with a brake on the rear of a double-shafted motor. However, these assemblies used up too much space, and their brake torque was not enough to stop and hold the load. A ballscrew brake attached directly to the end of the ballscrew saves space and provides effective braking when applied directly to the ballscrew.
Safety First
Manufacturers are increasingly looking for ways to reduce the risk of harm to people, equipment or the environment that may arise from the operation of production equipment. An intelligent risk-reduction strategy will protect personnel and machines; increase
productivity; improve efficiency; and increase uptime.
Studies show that most accidents do not occur under normal operating conditions, but rather during programming, maintenance, repair and testing. Adequate safety measures are therefore required to prevent loads from falling or linear motion axes from moving when performing maintenance tasks or partially powering up the equipment. Even in purely horizontal movements, many systems use brakes to prevent coasting during machine stops triggered by the opening of a movable guard or other safety barrier.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!





