Vision Enables Flexible Assembly
A new, flexible assembly system produces the same volume and part mix as six older machines.

The CNCAssembly system consists of seven assembly stations, or engines, linked together by a linear-motor transfer system. Photo courtesy Cognex Corp.
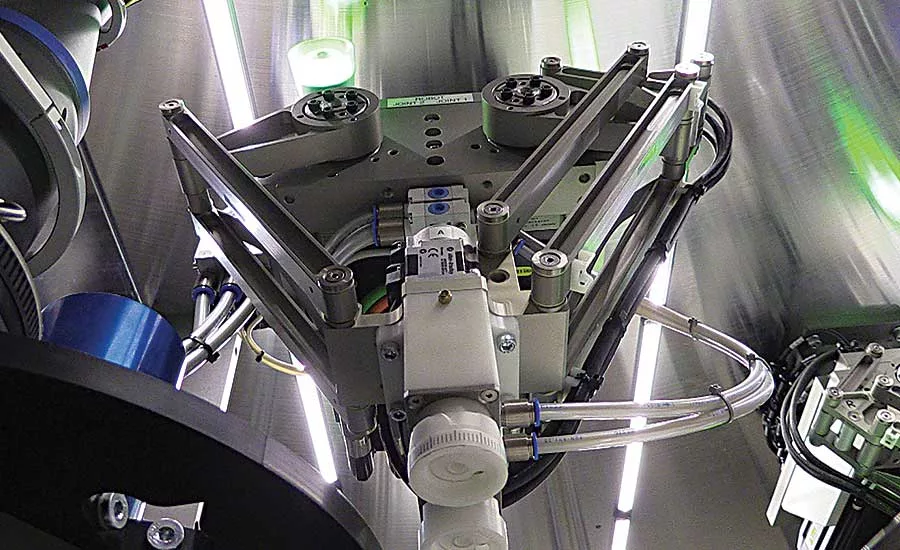
At station 4, a robot orients and assembles plastic spacer-plates onto the bases. A vision system inspects the subassemblies to verify that each part has a spacer-plate and it is correctly positioned on the spacer. Photo courtesy Cognex Corp.

This system assembles six families of an electromechanical product, for a total of more than 75 product variants. Photo courtesy Cognex Corp.
A Fortune 500 manufacturer of electromechanical products previously operated six separate indexing assembly machines, each producing one of a family of products at about 40 parts per minute. The machines frequently sat idle, as demand fluctuated for the various products. Labor expenses were high, since each machine required a dedicated operator.
The problem had reached a point where the manufacturer considered moving the six machines and their entire production offshore to an emerging-market country to reduce labor expenses and save floor space at its European facility.
Instead, the company opted to redesign its automated assembly systems, investing in CNCAssembly technology from Canadian systems integrator Transformix Engineering Inc.
CNCAssembly technology uses electronically cammed servomotors to assemble products at higher rates than traditional indexing machines. The system can independently move and electronically synchronize all assembly and part-handling motions.
With traditional indexing machines, tools and parts invariably sit idle during each machine cycle. In fact, this idle time typically makes up the majority of each cycle. The CNCAssembly platform avoids this lost time.
With only a limited amount of quick-change tooling and with the motion of both pallets and tools controlled by software, the machine can be rapidly configured to assemble any of the more than 75 different products in the manufacturer’s portfolio. The flexibility of the new approach allows the manufacturer to easily add future products at a relatively low cost by changing software or by adding new tooling.
Vision systems from Cognex Corp. are an integral part of the communication and decision-making processes of all CNCAssembly machines. Vision systems are used extensively for tasks such as inspecting incoming parts, identifying parts, determining part orientation, verifying that assembly operations are complete, and final inspection.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
Flexible Manufacturing Challenge
The manufacturer assembles many different products in relatively small quantities that, when combined, add up to a considerable total production volume. The combined volume would be a good fit for a continuous motion assembly machine. However, continuous motion machines are not very flexible, and, in most cases, they cannot handle non-round parts.
Thus, the manufacturer had been assembling these products on a series of traditional, custom-designed indexing assembly machines. These machines used crossover cams and sequential processes to provide intermittent motion to carry the assembly from station to station where pneumatic or cam-actuated operations were performed.
While conventional rotary indexing dial machines offer more flexibility than continuous motion machines, they are slow. As a result, multiple machines were required to achieve high output rates. A key characteristic of indexing machines is that the actual work is usually done in only a very small proportion of the cycle time. One reason is that all of the assemblies on the machine are mechanically linked together, so that every assembly and tool must wait for the slowest operation to be completed before moving on to the next station. Another reason is that the indexing mechanisms in these machines operate at only one speed. This speed is limited by the need to avoid damaging the parts and the indexing mechanism when the parts come to a stop at the end of each indexing cycle.
A Flexible Assembly Machine
The new CNCAssembly approach to automated assembly borrows some of the same thinking that went into the development of CNC milling machines. All movable axes are driven by servomotors. The motion of the motors is controlled by software and monitored by encoders. This means that each assembly and each tool can move independently without waiting for other parts to be moved or other operations to be completed. Very little time is spent at each station, typically on the order of 300 milliseconds, so these machines appear to the naked eye to be moving continuously. The faster speed of the servo drives and their ability to accelerate and decelerate the assemblies based on software instructions provide further productivity gains.
Another key factor in the productivity gains is a control software function called RSM Technology (Rapid Speed Matching) that syncs the motion profile of different servo-controlled tools when needed. For example, two servo-controlled tools may be synced so that one tool can hand-off a part to the second tool, or one tool can perform an operation on a part held by the other tool.
The ability to easily change the motion profile of the tools or pallets increases product quality by allowing the manufacturer to fine-tune the assembly process through the human machine interface (HMI).
Each station consists of one of a few basic types of processing module called engines, which can be tooled and programmed to handle a wide range of assembly operations. In most cases, the machine can be changed over to handle another member of a product family simply by making a recipe adjustment to the program through the HMI. Depending on the tasks at hand, the system can be configured with up to 12 engines.
Vision Inspection Operations
The CNCAssembly concept would not be viable without the extensive use of machine vision to check that the correct parts are being fed into the machine, to determine the orientation of the parts, and to inspect subassemblies to ensure that previous operations have been performed correctly. In the past, Transformix used PC-based vision systems, but found that integration of the camera, image processing card, and PC-based software required considerable engineering resources.
“We were able to substantially reduce the time required for integration by using Cognex vision systems that include the camera, imaging acquisition and software. They can be set up with a simple graphical user interface,” says Matthew Newcombe, vision specialist at Transformix.
Another advantage is the wide range of vision tools that can be accessed without writing a line of code. These include the Cognex PatMax algorithm that accurately finds objects despite changes in angle, size and shading. Transformix selected the Cognex In-Sight 7400 vision system for this machine, because it offers a fast processing speed and access to the Easy Builder graphical interface.
How the Machine Works
For the manufacturer’s application, the CNCAssembly system consists of seven assembly stations linked together by a linear-motor transfer system.
As an example, the following are the assembly and inspection steps for one of the company’s products:
At the first station, bases enter an RSM in-feed disc. A vision system checks the geometry and features on each base and checks for the presence of delicate electrical terminals and a threaded post. It also determines the orientation of the bases, which are randomly presented by the conveyor. These and other inspection operations are performed with the PatMax pattern recognition tool, as well as blob detection and histogram functions.
A pick-and-place robot then picks up two bases and orients them both before placing them on one of the servo-controlled pallets that move bases from station to station. As soon as the operation is completed, the pallet moves to an inspection location where another vision system performs additional inspections to confirm placement of the two bases.
The pallet then enters station 2 where silicone spacers, conveyed in a single lane on an air-track, are singulated by an RSM in-feed disc. A vision system inspects the type, OD and ID of the spacer. Bad or nonconforming parts are removed whenever possible prior to the entering the machine to improve reliability and uptime. This is a local rejection at the station and not at the end of the process. When the subassembly on the pallet is incomplete because a bad part was detected, the other engines will not try to load or assemble parts to it. A robot picks the good spacers from the disc and assembles them to the bases on the pallets.
Station 3 is similar to station 2. The only difference is that it installs a mechanical lever onto the post, rather than a spacer. A vision system inspects the subassemblies to verify that each part has a lever and spacer.
At station 4, a robot orients and assembles plastic spacer-plates onto the bases. A vision system inspects the subassemblies to verify that each part has a spacer-plate and it is correctly positioned on the silicone spacer.
At station 5, covers enter in two lanes in a known orientation. An RSM disc external to the line singulates the covers and presents them for vision inspection to confirm their identity. Bad or unidentifiable parts are ignored by the robot and rejected. The robot then picks two covers, tilts them to the proper orientation, and presses them down onto the subassemblies.
At station 6, a measured amount of Loctite thread-locking adhesive is applied to the post, and a nut is threaded on until it reaches a specified position and torque value. Another vision system inspects the height of the cover-to-body assembly and the distance of the nut to the cover to ensure that all the parts have been properly assembled.
Finally, a robot at station 7 picks up each assembly and places it onto an unload conveyor. The same robot then clears the mover of any remaining bad assemblies. Parts that have failed earlier tests remain on the mover until this station, but no further operations are performed on these parts.
The new machine can easily produce more than 75 variants with only a 5 minute per station changeover time, enabling the machine to run nearly continuously to produce whatever part is in greatest demand at the moment. The machine requires only one operator, providing a significant reduction in labor expenses.
The production rate of the new machine is 300 parts per minute, which exceeds the production of all six previous machines combined. If needed, the machine could be retooled and reprogrammed to assemble a new product.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!




