Wire Maker Gets Hooked on Robotic Bin Picking

Wire and spring makers do some quite-interesting work. Ace Wire Spring & Form Inc., for example, regularly turns thick wire into specialty hooks using a complex, multistep production process.
The process begins with bending the wire into 5-centimeter hooks and moving them as bulk material into bins. After this, each hook is inserted into a press that forms the ends and drops them into a bin. These hooks are then brought to another station where a bead is placed on each hook end, and both are pressed together with a spring. The final product is a swivel hook extension spring that is used as a tensioning spring for fan belt pulleys.
For a long time, Ace Wire workers manually removed the raw hooks from the bin, inserted each hook into the press for end forming, and then dropped it into a bin. Eventually, though, Ace Wire decided to have a robot perform this mundane task, and free up skilled employees to do more important work on the production floor.
Company owner Rich Froehlich fully understands the challenge that random bin picking presents to any robot, and that it needs a vision system to accurately perform the task. To meet this challenge, he turned to Pittsburgh-based CapSen Robotics Inc. CapSen specializes in integrating 3D cameras, 3D alignment and machine learning algorithms to detect the positions and orientations of multiple objects in cluttered areas.
Ace Wire purchased and installed the CapSen PiC system for the application, which involves the processing of 300,000 to 400,000 hooks. The system turns any industrial robot arm into a bin picking workcell, and includes 3D computer vision, and
full-motion planning software and control. These features enable the robot to perform general picking of many different objects, thereby eliminating the need for custom programming.
“We don’t build the robots, but we give them more spatial intelligence with the software that we write for 3D vision and motion planning,” explains Jared Glover, CEO of CapSen. “The robots can recognize objects and plan their motions intelligently for tasks like disentangling objects, machine tending and pick-and-place work. It does this in a way that is flexible for quick repurposing of the robot.”
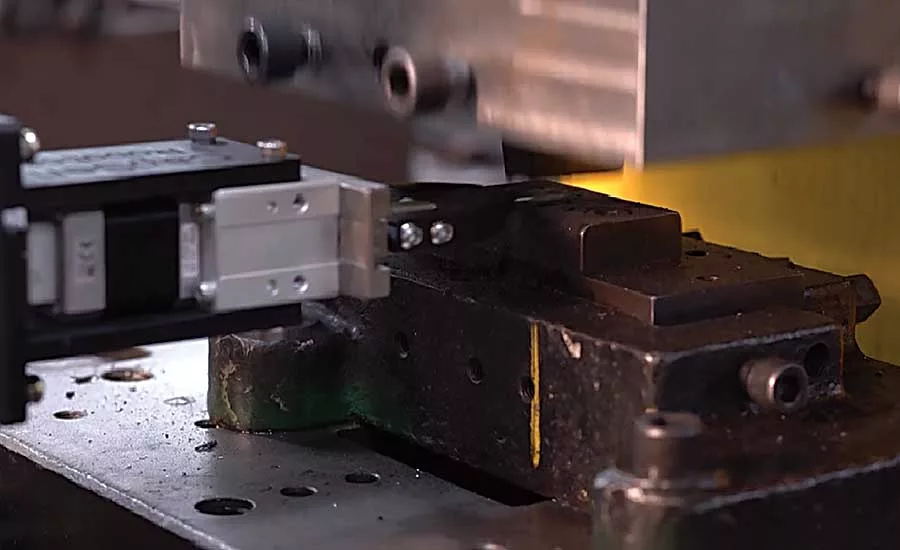
During operation, the system’s computer vision automatically photographs and analyzes each object to verify its orientation and location. It then communicates each object’s position, gripping points and optimal movement to the robot, which uses its gripper to retrieve a single hook and reorient it on a side-protruding fixed metal peg. It then moves the hook into the press opening; holds it there during end-forming; and then drops it into a collection bin.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
Successful implementation of the system did take considerable effort, admits Glover. He says his team used digital I/O to connect the workstation computer to the inputs and outputs of the parallel gripper (made by SMC Corp.), as well as nearby sensors and magnets. The team then tried about 20 different finger designs before finding the right one that enabled the gripper to pick up each hook on either end.
Since installing the system last fall, Ace Wire has experienced fewer mistakes and less production downtime. This positive result has Froehlich looking into increasing plant production and automating other manufacturing cells with the CapSen PiC system.
For more information on robotic bin picking, call 412-312-6485 or visit www.capsenrobotics.com.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!