Five Things: Robot End-Effectors


Gripper Serves Up Hot Cups of Joe
In Germany, your next cappuccino could be served not by a 20-something dude with a pony tail and an earring, but a robot.
MyAppCafé is a fully automated robotic barista. The machine is the brainchild of caterer and entrepreneur Michael Stille of Karlsruhe, Germany, who envisioned a fully automated system for vending coffee at catered events and trade shows.
Capable of dispensing 80 to 120 coffee drinks per hour, MyAppCafé can operate 24/7 with minimal intervention. An operator only needs to tend the machine once per day to clean it and refill coffee beans, cocoa, milk, syrup, water and cups. Customers order their favorite coffee beverages via a touch-screen display and pay through an app. As a gimmick, the machine can be sent a photo through the app, and a food-grade printer can reproduce the image on the foamed milk.
The machine was designed and built with the help of IBS Ingenieurbüro, a systems integrator in Karlsruhe. The project was tricky. A high level of process reliability would be important, since the machine would be running untended.
A big challenge was how to handle four sizes of cup with one gripper. The cups would be supplied in stacks on a rotating dispenser. To remove a cup from the stack, the robot would have to grip it tightly enough to overcome friction, but not so tightly that it would crush the cup or pick up multiple cups at once.
An electric two-jaw parallel gripper from the Zimmer Group—the GEP2013IO-00-A—solved the problem. The gripper provides a large stroke in a small installation space, and engineers can regulate gripping force over four levels. As a result, the gripper grasps each cup with just the right amount of force every time. IBS developed the fingers for the gripper, which were manufactured using 3D printing.
Soft, Sensitive Fingers Give Robots a Human Touch
For robots to safely manipulate or interact with fragile objects and living organisms, they will need grippers that have soft, dexterous fingers with a sense of touch. Ideally, the gripper should have proprioception—a sense of its own movements and position—to safely execute various tasks.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
However, traditional force and position sensors are too rigid to be used in soft fingers. Moreover, existing soft grippers are usually designed with a single type of proprioceptive sensation—either pressure or finger curvature.
To overcome these limitations, researchers at Ritsumeikan University in Kyoto, Japan, used multimaterial 3D printing technology to fabricate soft robotic fingers with built-in proprioception sensors.
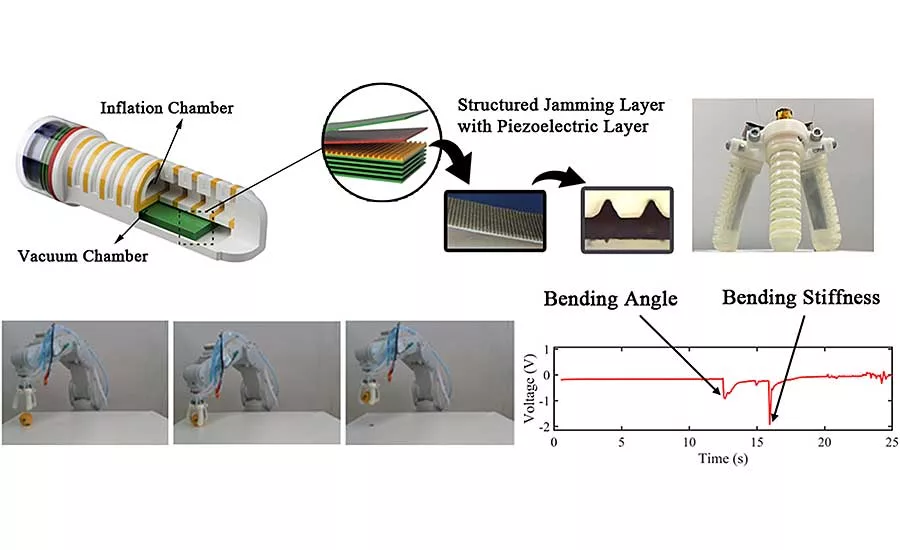
The finger has a reinforced inflation chamber that enables it to bend in a highly controllable way according to input air pressure. The stiffness of the finger is tunable by creating a vacuum in a separate chamber. This was achieved through a mechanism called vacuum jamming, by which multiple stacked layers of a bendable material can be made rigid by sucking out the air between them. Both functions enable a three-finger gripper to grasp and hold any object without crushing it.
A thin layer of piezoelectric material is included among the vacuum jamming layers as a sensor. The material produces a voltage difference when force is applied. The researchers leveraged this phenomenon as a sensing mechanism for the finger, providing a simple way to sense both its curvature and stiffness. They further enhanced the finger’s sensitivity by including a microstructured layer among the jamming layers to improve the distribution of pressure on the piezoelectric material.
3D printing enabled the researchers to integrate the sensing and stiffness-tuning mechanisms into the design of the finger. “Our work suggests a way of designing sensors that contribute not only as sensing elements for robotic applications, but also as active functional materials to provide better control of the whole system without compromising its dynamic behavior,” says Mengying Xie, Ph.D., an associate professor of robotics at the university.
New Scale Robotics Becomes Certified Integrator for Universal Robots
New Scale Robotics is now a certified system integrator (CSI) for Universal Robots (UR), a manufacturer of collaborative robots. This enables New Scale to sell and deploy UR collaborative robots equipped with its Q-Span workstation kits for measuring small parts.
A UR+ certified application kit, Q-Span automates the tedious process of manually measuring small parts for quality control and recording the data for statistical analysis. CSI status allows New Scale to offer the convenience of one-stop shopping to its customers in high-mix, small-batch manufacturing.
“The Q-Span workstation kit is a do-it-yourself metrology solution that customers can easily deploy and redeploy, without ongoing CSI assistance,” says David Henderson, CEO of New Scale Robotics. “On the other hand, companies that want to deploy faster or get help with customization, such as integrating air gauges, linear probes or other third-party tools, can leverage our expertise in metrology and UR cobots to do that.”
New Scale Robotics has been part of the UR+ system since 2018. “Certified system integrator status demonstrates our confidence in New Scale’s knowledge of UR cobots and the URCaps platform, and the company’s ability to optimize system performance,” says Silas Neale, channel development manager for Universal Robots.
The Q-Span workstation kit includes robotic grippers, robotic calipers, sample programs, sample parts and accessories, and a workstation cart that moves easily about a facility. With a UR cobot, it can operate alongside employees and fit into existing workflows.
Cobots Inspect Vehicles
A Japanese automaker is using a team of four cobots from Techman Robot Inc. of Taoyuan City, Taiwan, to perform a final quality check of finished vehicles coming off the assembly line.
The six-axis cobots are mounted to the ceiling of the inspection station. The cobots are equipped with vision systems and lenses of various focal lengths to inspect different parts of the vehicle. The station also features multiple stationary vision cameras.
The arms can move inside and outside of the car to inspect components such as wipers, horn, seats, seat belts, steering wheel, dashboard, center console, remote control, fog lamps and trim. All images are archived for traceability and analysis.
$5.7 Billion
The global market for robot end-effectors is expected to grow from $2.6 billion in 2019 to $5.7 billion in 2024, a cumulative annual growth rate of 16.9 percent, according to market research firm Markets and Markets.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!




