What to Consider When Choosing an Electric Motor
Speed, torque and accuracy are among the factors to consider when choosing an electric motor for an application.



Although motors are a fundamental part of any motion system, selecting the right motor for an application is rarely an easy decision. There are various motor technologies to consider, and each has characteristics that can affect the design in different ways. Factors such as speed, torque, lifetime, mechanical envelope, accuracy and duty cycle will determine whether you choose a brushless DC, coreless DC or stepper motor.
Speed and Torque
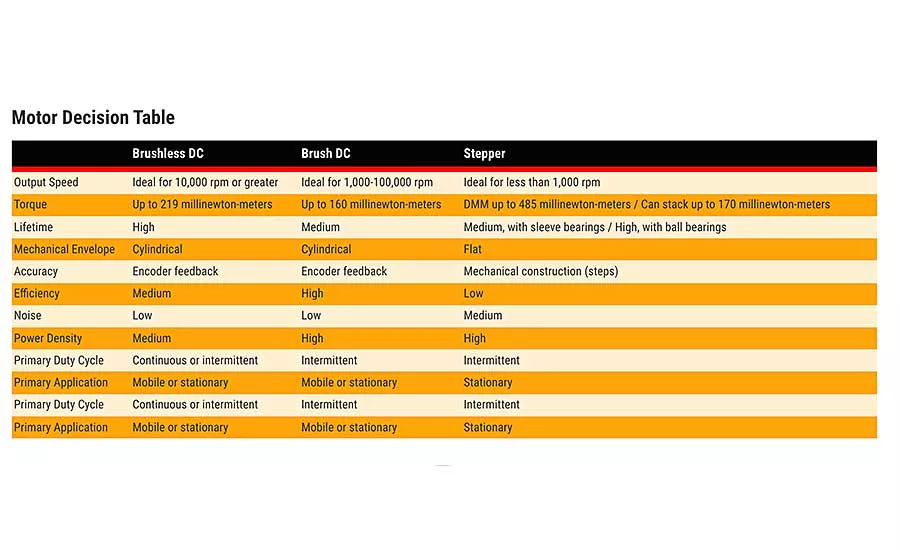
Your motion system’s output speed requirement should be one of the first factors to consider when selecting your motor. Brushless DC motors are well-suited for higher speed operation. Coreless DC motors work well at moderate speeds. Higher speeds cause the brushes to wear, which can lead to a shorter lifetime. Stepper motors are electronically commutated, but their higher number of pole pairs makes them suitable to run at lower speeds.
Another factor to consider is the output torque requirement of your motion system. Engineers should focus on both the continuous torque for the application and the peak torque for a limited time during operation. Different motor technologies are characterized by different maximum continuous output torque capabilities. However, depending on the application, all three motor types may be capable of delivering the required output torque. Additionally, you may add a gearbox to increase your motion system’s output torque capability. Note that there is a corresponding reduction in output speed, according to the gear ratio.
Operating Lifetime
The motion system’s work is typically defined in a number of cycles per day and time per cycle, or hours of operation per day and duty cycle. With this information, you can determine the maximum number of hours the motion system needs to operate over the anticipated product life. This prediction will influence your motor selection. Brushed DC motors have a mechanical commutation system that wears over time, limiting their lifetime, while brushless DC and stepper motors are electronically commutated and do not have any of the associated wear, giving them a longer expected lifetime.
Bearings also influence the lifetime of a motion system. Sleeve bearings will provide a few thousand hours of life, while ball bearings will generally provide more than 10,000 hours of life. Of course, the radial and axial loads applied to the motion system’s shaft must fall within specified design limits. Additionally, increased heat inside the system may adversely affect the lifetime of the lubricants.
Mechanical Envelope and System Accuracy
To achieve your required mechanical envelope, you must first confirm that the motor technology you choose is available in a diameter and length that will fit in its intended space. While speed and torque requirements can often be met by one or more motor types, and even by variations within a given technology, you must also be certain that the motor’s power capabilities are sufficient for the application.
With respect to system accuracy, both brushed and brushless DC motors require an encoder to track and control the position of the rotor. Standard encoders offer a range of resolutions within the same package size to meet varying application requirements. You can also increase resolution by adding a gearbox to the front of the motor. The resolution is multiplied by the gear ratio, so you can achieve precise positioning by combining the encoder and gearbox multipliers.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
Stepper motors are constructed to provide positioning accuracy. The number of poles on the rotor will dictate the number of steps per revolution, producing a step angle for each pulse given to the motor. Drivers typically can increase this resolution via half-stepping or micro-stepping, creating intermediate electrical steps between mechanical steps. An optional gearbox may also provide additional resolution based on the gear ratio.
Duty Cycle
Typically, the motor does not run continuously in an application. It usually operates for a period and rests for a period. When it comes to duty cycle, pay attention to the motor’s temperature rise. All motors have a maximum rated temperature. Operating the motor above that temperature can damage its internal components. The amount of current the motor draws will influence the temperature rise; the higher the current, the faster the temperature will increase.
Since current is proportional to the torque output of the motor, you may be inclined to increase the current to increase the torque, keeping the motor’s overall size as small as possible. Keep in mind, however, that the on-time requirements for the cycle have to be balanced so the current drawn doesn’t cause the motor to exceed its maximum operating temperature.
Finally, don’t forget about environmental factors that may affect duty cycle. Will the motor be mounted to a base that can conduct heat away? Is there enough air flow around the motor to help keep it cool? Will the motor be housed inside an enclosure among heat-generating components that will raise the ambient temperature?
Stationary vs. Portable
If the product will be in a fixed location, you’ll have greater flexibility in regard to a motor’s size and weight. You can focus more on the performance characteristics you need for your application. For battery-powered mobile or ambulatory products, the motor’s current draw is critical. The lower the current draw—while the motor meets its performance requirements—the longer the battery can run between charges. Be sure to prioritize motor size and weight for battery-powered devices.
Every application presents many factors to consider during motor selection. When determining the most suitable motor technology for your application, you must carefully weigh all the factors and decide how they will affect motor performance so you can develop an optimal product.
For more information visit www.portescap.com.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!






