Hexapod Keeps Mirror Segments Aligned During JWST Assembly

More than 18 years after NASA commissioned it to be built by TRW Inc., the James Webb Space Telescope (JWST) was launched into orbit by Ariane rocket flight VA256 on Dec. 25, 2021. The launch took place at the Guiana Space Centre in French Guiana.
About 30 minutes after launch, and continuing for nearly 13 days, the JWST deployed its solar array, antenna, sunshield, and primary, secondary and tertiary (third level) mirrors. The Space Telescope Science Institute in Baltimore oversaw all deployment actions. In January, the JWST arrived at its solar orbit, Lagrange Point 2, marking the completion of its million mile journey and the first month of its half-year long commissioning period.
The JWST is the largest telescope ever launched into space—measuring nearly the size of a tennis court in its unfolded operational configuration. The telescope’s primary mirror is lightweight and segmented into 18 hexagonal pieces on a hinged surface more than 21 feet in diameter.
Each segment is made of beryllium for maximum stiffness, minimum weight and to enable the mirror to withstand extremely low temperatures in outer space. A thin gold coating helps reflect infrared light. Segments are designated A, B or C, depending on their location within the hexagon.
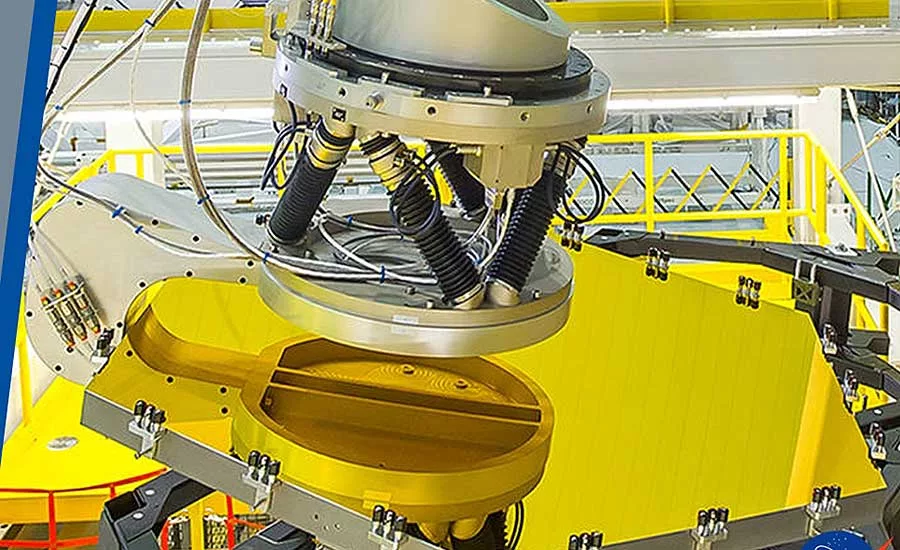
NASA engineers used a robotic arm, called a Primary Mirror Alignment and Integration Fixture, to join the segments. The arm was precisely controlled in six axes by a custom hexapod (the Stewart Platform) made by Auburn, MA-based Physik Instrumente (PI).
Positioned at the arm’s end, the hexapod has a 200-kilogram load capacity, and offers submicron resolution with a programmable center of rotation, or pivot point. Accompanying software simulates the limits of workspace and load capacity, thereby ensuring that the hexapod will handle the specific loads, forces and torques in an application. All of these features enabled NASA engineers to keep each segment precisely aligned during assembly.
Building the JWST represents the second project in recent years where NASA and PI have worked together. Last year, the space agency and the Jet Propulsion Laboratory (managed by Caltech) relied on PI’s high-performance multilayer piezo ceramic actuators to help the Curiosity Rover precisely retrieve surface samples from Mars.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
A total of 16 PICMA P-882–P-888 stack actuators were used to control feeder vibration in the rover’s sample handling system. This system consists of 32 sample chambers (including five that contain fixed references) arrayed around a sample wheel. The chambers are arranged in pairs with one actuator coupling each pair.
During sample collection, mineral powder is fed through a funnel into individual cells. The actuators ensure that the powder is shaken at variable amplitudes and frequencies in the range of 0.9 to 2.2 kilohertz to homogenize particle size or density segregation.
NASA’s testing of the actuators validated their performance at more than 100 billion cycles, easily qualifying them for use on the Curiosity. Since the rover landed on the red planet in August 2012, all of the actuators have reliably performed under the harshest of conditions.
For more information on hexagons, actuators and other precision motion technologies, call 508-832-3456 or visit www.pi-usa.us/en.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!



