advertisement
How To How to choose the right type of EAOT for your collaborative robot?


So, you just bought your first cobot, and now you need a way to pick up your parts. What you need to decide on is what type of end-of-arm tool (EOAT) you require.
Depending on the part shape, weight and material being picked up, you may need a surface contact based system such as a vacuum cup or a magnetic gripper. Alternatively you may require a mechanical based system such as a parallel gripper.
There are many types of gripper on the market with the most common being parallel 2-jaw, 3-jaw concentric, long stroke and angular grippers. Again, what you require depends on the part shape, weight and material but also you have to consider the task or tasks you expect your robot to perform, how fast you want it to perform said tasks (cycle time) and how flexible you need the robot to be if you are picking up multiple parts.
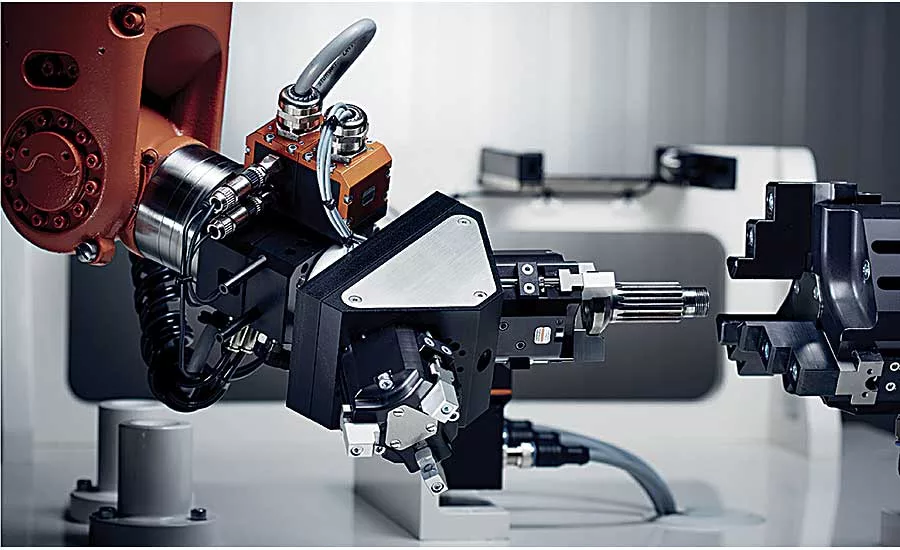
As a simple example, if your robot is machine tending which is a very common task for a robot, and your intention is to keep it on one machine only with only one part, a common set up for this is to have two grippers mounted at a 90° angle from each other. In this setup, you are reducing your cycle time significantly compared to only using one gripper because a) the finished part can be removed and the new raw part loaded with the robot only having to move into the machine once rather than twice and b) the robot can pick up the raw part and place the finished part whilst the machining continues. If your robot only has one gripper all these tasks must be performed with the machine doors open, increasing your overall cycle time.
Pneumatic vs. Electric
Once you know the type and number of grippers required, you also have a choice of drive type. Traditionally, the most common drive type has been pneumatic, however, the electromechanically driven segment has been growing rapidly in recent years.
Pneumatic grippers continue to have a wider variety of styles, stroke ranges, and force outputs.
Electric grippers now have to be considered as they have become more affordable and generally reduce your running costs, accessories, setup times and downtime.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
With an electric gripper if you are planning on tasking your collaborative robot to handle multiple applications and locations, moving your collaborative robot from station to station becomes much easier when not having to worry about compressed air lines and additional valves at each station. Another added benefit over pneumatic grippers is that most electric gripper offerings have built in sensors and all this can often be connected directly to your robot.
Electric grippers have evolved over the years from the basic grip open/closed driven by gearmotors to very advanced DC servo driven grippers with full programmability of position/speed/force, integration with Industry 4.0, and capability to outperform its pneumatic counterparts both in speed and force.
Safety Considerations
Lastly and most importantly, we cannot talk about collaborative robots without talking about safety. There is also a need to distinguish what makes a collaborative gripper and whether your application needs a true collaborative gripper.
With safety fences eliminated, collaborative grippers currently in development will have visual status cues, housings that have no sharp edges, gripping forces that are limited to maximum threshold guidelines so as to not cause injury to humans, and no exposed mechanical linkages that may serve as pinch points.
If you need any help or advice regarding your EOAT, please do not hesitate to get in touch with any of us at Zimmer Group.
Written by Costas Charalambous –
costas.charalambous@zimmer-group.com
Edited by Russell Tyler –
russell.tyler@zimmer-group.com
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!





