advertisement
How To Select The Correct End Of Arm Tool For Your Robot


The collaborative robot market has exploded from a few early adopters to some of the world’s largest manufacturers implementing them factory wide. Before these fast-deployable robots, automation was often embraced by larger manufacturers with high volume/low mix production of workpieces. These manufacturers are now turning their attention towards new types of automated processes that were not possible before. At the same time, additional smaller manufacturers are now automating for the first time with traditional uses such as machine tending, pick and place, or assembly of parts using these new robots.
The flexibility of cobots is another reason why leading market researchers expect the cobot market will continue to grow at a rapid pace for the years to come. With so much going on in this space it can sometimes be difficult for new robot users to know how to choose end-of-arm gripper tooling. Luckily a wide range of standard end effector options are available for nearly every type of material handling application.
The current challenge for many manufacturers of peripheral robotic devices is how to clearly convey which products are best suited for different tasks. Not all situations where cobots are deployed involve humans working side by side with their robot counterparts. Many require gripping devices that produce more force or power than is deemed safe for direct human-interaction during operation. One of the ways that this challenge has been addressed by SCHUNK is by creating the Cobotic Accessories Program. The products in this program have been developed to compliment a wide variety of cobots and light weight industrial arms, with solutions that are suitable for both collaborative and industrial uses.
Safety First!
Collaborative robot end effectors should follow ISO 10218 standard and the ISO/TS 15066 Technical Specification. Before installing any robot, a safety risk assessment should be done, and the ISO specifications should be considered for the entire project. When specifying a collaborative gripper on the market today you need to evaluate pinch points, clamping forces, and sharp or hard edges that could potentially harm a human coworker. Look for a gripper that has rounded housing with no sharp corners, safe gripping features that either limits the force of the gripper or has intelligent gripping technology for safety when higher forces are needed. Redundancy in the gripper is important for safe operation so that the grip force never exceeds safe values with human interaction.
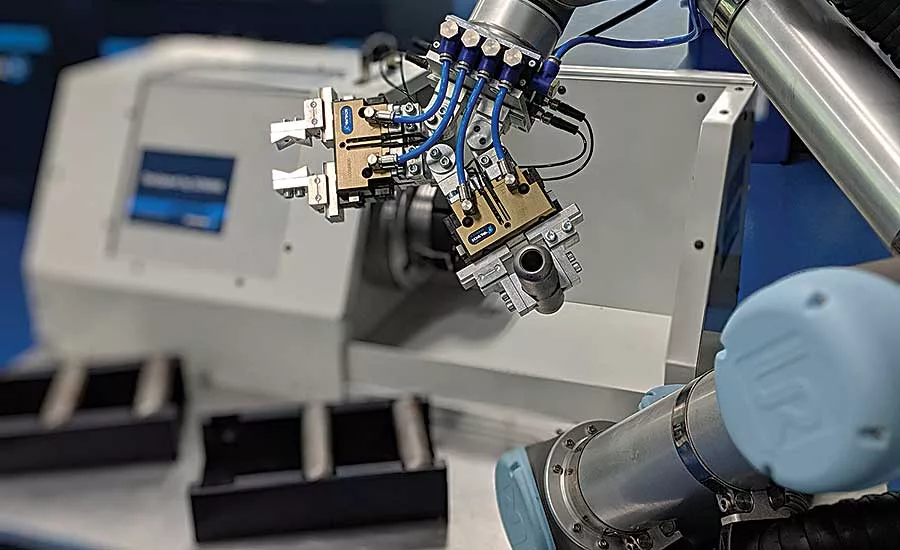
A variety of plug and work solutions are available that provide higher gripping forces for more demanding processes. Plug and work products should be easy to install and operate, and generally it is kept simple by including everything you need to install and operate the end effector. The advantage of using plug and work grippers is that they bolt directly to the robot, have software plug-ins that allow the gripper to be programmed from the robot teach pendant, and include necessary features like pneumatic valves, sensors, and cabling with the gripper.
Flexibility is key
Another criteria that should be considered when choosing a gripping solution for your robot should be flexibility. If you plan to redeploy a robot or handle multiple workpieces, you might need something that can be continually reconfigured.
A good application example is loading and unloading a machine. In a traditional setting you would design custom adapter plates for the gripper then design custom fingers to grip the part and you would need to account for any interference issues that the machine might cause due to the path the robot. Even after installation is complete adjustments may be necessary, just a couple of millimeters to the left or right, which means either re-drilling plates or manufacturing new ones - this costs time and money. Look for a solution that allows you to adjust the positioning of the gripper without any additional machining or redesign.
One option which is specifically designed to be flexible is SCHUNK’s Flex Grip Tool, this is an erector set for end of arm tool construction. Grippers, standard fingers and adapter plates are kitted together with robot adapter plates and other needed peripherals which eliminates the need for upfront design work. This is especially useful when you need to start producing parts today, and don’t have the time or resources to engineer a custom solution.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!







