Force and Torque Sensors
Advanced technologies increase the accuracy of force and torque sensors used in product assembly and end-of-line testing.

The 8400V series of bearingless digital torque transducers are accurate to within ±0.027 percent of full scale and offer torque capacity from 28 to 11,000 newton-meters. Photo courtesy S. Himmelstein and Co.
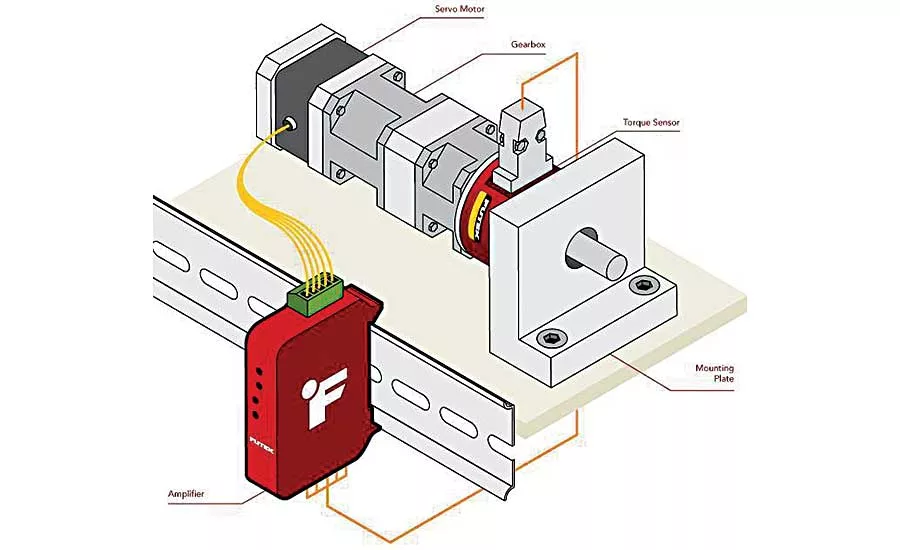
Torque sensors are installed between test pieces and their mounting plates. Graphic courtesy FUTEK Advanced Sensor Technology Inc

Shaped like a bolt, the 9217-A piezoelectric force sensor measures quasistatic and dynamic tensile and compression forces of 1 or more millinewtons on robots and automatic assembly machines. Photo courtesy Kistler Instrument Group

Robots are increasingly being made to mirror humans. The best example of this is the dual-armed robot—such as ABB’s YuMi and Rethink Robotics’ Baxter—designed specifically to work closely with people on the assembly line.
Another example is the compliantly engineered ECCERobot, which mimics the inner structures and mechanisms of a human being. The robot was developed by the Robot Studio based in Divonne-Les-Bains, France.
In 2015, Studio engineers decided to measure the tensile and compression forces exerted on the robot’s hands, arms and shoulders while it is lifting objects. They selected FUTEK’s LSB200 force sensor for the experiment because of its small size (0.75-inch wide and 0.25-inch thick) and high accuracy. The engineers positioned more than 60 of the sensors along each forearm and below each shoulder.
The LSB200’s size and accuracy make it a good fit for various assembly applications as well, notes Richard Walker, senior engineering director at FUTEK Advanced Sensor Technology Inc. Another benefit is its 1,000 percent overload rating, which enables the sensor to withstand incidental loads up to 10 times its calibrated range.
One medical device manufacturer operates a catheter test stand equipped with a different FUTEK force sensor (LSB210 load) and its TRH605 hex-drive rotary torque sensor. Paired with a USB output kit, and test and measurement software, the sensors measure the track force and torque of a catheter as it’s pushed along the stand’s surface and formed into a complex orientation.
Tests like this one, as well as a wide range of assembly processes, cannot be properly performed without torque and force sensors. Thankfully for manufactures, the advanced technologies of these devices ensure reliability and accuracy in every application, whether it’s tightening a fastener, installing a valve or verifying operation of electronic switches.
Simple Devices
Sensors are simple, straightforward devices that, in essence, serve as various human senses within automated equipment. They are used in assembly and end-of-line testing operations to detect the presence, position, orientation or movement of an object. After the sensor initially measures a physical quantity, an external signal conditioner converts the data into an electrical energy measurement so it can be read by a person or instrument.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
Force sensors monitor the rate of change, and the relative change, in force between two surfaces. The sensors may be bolted or magnet-mounted within the assembly or testing equipment, or onto the part tooling.
Torque sensors measure and record the rotational force on various rotating systems. Some torque sensors only measure static torque, while others are able to handle static and dynamic (in process) torque. The sensors are installed between test pieces and their mounting plates, and either sit on a pedestal or “float” in the driveline.
All sensors are analog or digital. Analog sensors have an output that falls within a certain range, whereas digital sensors output a range of values that must increase in steps. Most models are directly wired to a PLC or data acquisition system, although some suppliers also offer telemetry-transmission sensors that wirelessly transmit data to receiving equipment.
The predominant measuring technologies of force and torque sensors are strain gauge and the piezoelectric. A strain gauge consists of a thin wire or foil arranged in a grid and bonded to a thin backing. The gauge is mounted to the sensor so that the conductors are aligned in the direction of the stress. When a force is applied to a structure, its length changes. Strain is the ratio of this change in dimension to the structure’s original dimension.
In contrast, piezoelectric sensors compress asymmetrical, elastic crystals to produce voltage. The amount of voltage is directly proportional to the amount of force. Because piezoelectric-based sensors have a wider measuring range, they are better able to measure dynamic loads than static ones.
Kistler Instrument Group makes piezoelectric strain sensors for indirect force measurements. Jim Macy, senior manufacturing specialist at Kistler, says these sensors are often used in applications with less-stringent measurement requirements.
The sensors are mounted to a nearby C-frame or column rather than directly on the part tooling or fixturing. This approach saves time and money and allows for easy retrofitting. These sensors also provide overload protection and the ability to measure very large forces because the structure absorbs the entire force. To enable a successful indirect measurement, particular attention must be paid to the selection of the sensor measurement location. The strain at the structure’s measuring point must be proportional to the force application point.
Application Driven
“Application is everything when it comes to picking a force or torque sensor,” says Walker. “A robotic assembly application, for example, may need an advanced multi-axis sensor that is low-profile enough to fit in end-of-arm tooling or a gripper. But, a manual testing process might only require a simple sensor to pass or fail an assembly based on its weight, which indicates whether or not the assembly contains all of the required parts.”
Automotive manufacturers rely on force and torque sensors to perform high-volume assembly and testing on a daily basis. Standard assembly work includes press-fitting bearings, seating valves and installing switches and buttons.
Mark Minda, business development and account manager at HBM Inc., says the company’s force sensors and torque transducers are used in automation, assembly and R&D applications. Steven Tveter, vice president at S. Himmelstein and Co., says several automotive customers use force transducers to verify proper bearing installation. Another process that force sensors monitor is the pinching of high-pressure enclosures in automotive parts during resistance welding.
On the testing side, OEMs and Tier 1 suppliers use force sensors to verify the performance of brake pedals, air bags, seats, pumps and speed control mechanisms. Torque sensors test power train components, suspension systems and engine horsepower to improve fuel efficiency. Rotary torque sensors are used for strain measurement, testing the clutch, gearboxes and dynamic torque within the engine. Tveter says his company’s torque transducers are used for auditing to verify that fasteners are tightened to the correct torque.
Kistler’s 9217-A piezoelectric force sensor is used for assembly and testing by different types of manufacturers. Shaped like a bolt, the sensor measures quasistatic and dynamic tensile and compression forces of 1 or more millinewtons on robots and automatic assembly machines. Force is introduced via an M3 tapped hole at the front.
The sensor offers high resolution, three calibrated measuring ranges (±5, ±50 and ±500 newtons) and a dynamic range of 1-to-100,000. Its preloaded measuring element provides high rigidity and a higher tolerance to bending moments. The sensor body has an M10x1 millimeter pitch external thread and a sealed connector.
Aerospace manufacturers frequently use force sensors or strain gauges during fatigue analysis research to determine wing and fuselage strength. Minda says these companies apply enough vertical force against the wing, and lateral force against the fuselage, until each component either cracks or fails.
NASA and its subcontractors rely on force sensors to measure burn rate during rocket booster testing. Walker points out that the Mars Curiosity rover has been using two FUTEK custom cryogenic force sensors since landing on the red planet on Aug. 6, 2012.
“One sensor operates within the rover’s drilling arm and monitors the drill bit’s force as it pierces into alien ground, and the surface’s push back force level,” explains Walker. “The other is a multiaxial load and torque sensor responsible for the maneuvers of the main robotic drilling arm. This sensor makes sure the arm never applies too much force, causing the turret system to break off.”
Makers of white goods, medical devices and consumer electronics benefit from force and torque sensors, as well. Such sensors are integrated into assembly and testing equipment for appliance doors, hinges and parts that get pressed, says Walker, adding that more-accurate sensors are a big reason why white goods manufacturers continue to increase their in-process testing. Macy says that appliance and automotive companies often use force sensors to verify different assembly processes.
Medical-equipment companies that resistance-weld dialysis machines sometimes use force sensors to verify proper pinching of high-pressure enclosures. As for consumer electronics, force sensors confirm the proper operation of switches and buttons, while rotary torque sensors help when testing small electric motors.
Recent Developments
Force and torque sensor technology has evolved significantly in four areas this century: accuracy, size, adaptability and housing materials. According to Tveter, sensors are up to 10 times more accurate than just a decade ago. Back then a sensor could achieve ±0.1 percent of full scale; today, it is capable of ±0.01 percent.
Proper calibration is essential to maintaining this level of accuracy. Tveter says that all of Himmelstein’s sensors are calibrated in an ISO 17025-certified lab to ensure high-accuracy performance from day one, along with full traceability.
HBM’s calibration labs are certified by the German government (PTB), and tests there show the company’s T12HP torque transducer to be one of the most accurate in the world, with a non-linearity at ±0.007 percent of full scale. Introduced earlier this year, the transducer has a Spanning feature that allows users to run detailed analyses of any partial measurement range from the full scale range.
Minda says the transducer is available with nominal (rated) torques ranging from 100 newton-meters to 10 kilonewton-meters. Its measurement flange directly installs in the drivetrain and is maintenance free. CAN, Profibus, EtherCAT, and Profinet interfaces ensure easy integration of the transducer with different test stand concepts. In addition, it is temperature compensated to 0.005 error percent per 10 degrees Kelvin of change.
Like many of the products they measure, sensors continue to get smaller. Walker says that some torque sensors are as small as a half-dollar coin, with ranges from 1 in-oz to 10,000 in-lb. FUTEK has been able to shrink the size of its sensors by hand soldering various contacts instead of hard wiring them, and using integrated circuits to eliminate wiring errors and increase repeatability.
Another technology that allows for a more compact sensor measurement solution is micro-electromechanical systems or MEMS. Macy says Kistler utilizes advancements in this technology, in conjunction with advanced piezoelectric crystals, to offer sensing solutions that feature smaller sensors with high sensitivity and precision. Sensors are also getting thinner to more easily fit in areas with limited space and stackup requirements.
Regarding adaptability, some suppliers offer dual-range sensors that allow manufacturers to easily switch between a high and low range of measurement. Dual-range torque sensors accurately measure peak and operating torque.
Torque sensors that use frequency modulation (FM) technology experience minimal wear, even in continuous-use applications. The torque signal is transmitted from the rotating shaft without contact, and processed as an analog signal.
All 10 bearingless digital torque transducers in Himmelstein’s 84000V series come with FM and analog outputs, and are accurate to within ±0.027 percent of full scale. Tveter says the series’ wide range of torque capacity (28 to 11,000 newton-meters) makes it popular among automotive and aerospace manufacturers for assembly and testing.
The easy-to-install devices have a 3-kilohertz dynamic response, high overrange (300 percent) and overload (200 or 400 percent), and are immune to clamping and other extraneous loads. Users can select from 10 units of torque measurement without having to recalibrate the transducer. Dual-range configurations are available.
Traditionally, sensor housings have been made of either steel or anodized aluminum. For the past several years, however, suppliers have offered models with stainless steel housings. Some sensor components are ceramic coated for insulation and wear resistance.
“Today’s strain-gauge-based transducers are excellent compared to products made decades ago,” concludes Minda. “However, end users must still be careful to use the transducers properly. There are many factors related to measurement uncertainty other than the transducer itself.”
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!





