Automation University
Delta Robots Feed the Need for Speed

By installing several delta robots in a row, even the most demanding production rate requirements can be met with a minimal investment in floor space. Photo courtesy Kuka Robotics Corp.
Spiders are one of the quickest and most efficient assemblers in nature. Just ask anyone who’s ever encountered a pesky web blocking a filter, tube, vent line or some other critical artery.
With their spindly arms and extremely fast motion, delta robots resemble spiders. Each arm is driven by a motor mounted in a stationary base above a large cylindrical work envelope. The arm joints work together to drive a rotary axis connected to an end-effector.

With their spindly arms and extremely fast motion, delta robots resemble spiders. Photo courtesy ABB Robotics
Jointed in the middle, the arms bend inward and connect with a small tooling plate to which the end-effector is attached. Coordinated movement of the forearms up or down pushes the elbows inward or outward, which move the plate in the X, Y and Z axes. As the robot moves up and down and side to side, the tooling plate remains parallel with the work surface.
Mechanically, delta robots are constructed very differently than other types of robotic configurations. Typically, most robotic arms are considered as serial-link, which relates to having each axis joint mechanically connected in series.
Deltas are considered to be a parallel-link robot, where the major axes are mechanically connected in parallel. This design provides great motion advantages with explosive speed, acceleration and high duty cycle.
With delta robots, all the motors are in a stationary location on the mechanism. Unlike other types of robots, the mechanism does not carry around the weight of the motors. And, the robots operate in an obstruction-free work envelope.
That, combined with components made out of lightweight materials, such as aluminum and carbon-fiber composites, provides a very low inertia system. This type of mechanical design enables delta robots to perform at high-speeds.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
The machines were originally designed for low-payload applications, such as packaging. That’s why they’re popular in the food processing industry, where they’re used to sort and pack everything from fine chocolates to frozen fish sticks. Cosmetic and pharmaceutical companies have also deployed many delta-style robots on their production lines.
In addition to packaging, manufacturers are discovering that delta robots are ideal for some assembly applications, such as adhesive dispensing, kitting, labeling, parts insertion, pick-and-place, polishing, screwdriving and soldering. The machines are used to mass-produce batteries, circuit breakers, electronics, medical devices, pens, semiconductors, solar panels and other products.
Unique Advantages
Delta robots provide several advantages for assemblers. They are faster than most serial-link robots and they have small footprints. In addition, there are no dead zones or singularity to maximize motion efficiency from one station to another with one straight move.
Simple assembly operations, such as picking, placing, stacking and kitting, can all be accomplished with a delta-style robot. Because of their speed, delta robots are best suited for assembly operations that utilize conveyors to present parts. That’s why they are typically mounted over a conveyor or a parts feeding device.
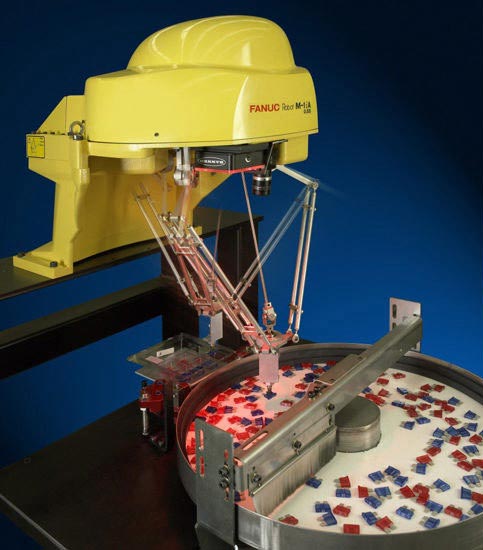
The unique design of delta robots enables great motion advantages with explosive speed, acceleration and high duty cycle. Photo courtesy Fanuc America Corp.
Delta robots are being deployed in high-speed assembly tasks as a means of placing components accurately and quickly in a larger work envelope than most SCARA robots. The fact that the robots are mounted overhead, coupled with the size of the work envelopes, allows for great flexibility in workcell design and the in-feed of components.
In small parts assembly applications, high speed and space restrictions are critical factors. Delta robots are popular in the electronics, semiconductor and solar panel industries to meet throughput demands. By installing several delta robots in a row, even the most demanding production rate requirements can be met with a minimal investment in floor space.
“Delta robots are typically used in high-speed picking and packaging applications in the consumer goods, medical and food industries,” says Jessica Juhasz, manager of application engineering in the general industry segment at Fanuc America Corp. “There is a large focus and growth for automation in the food industry, especially in primary food manufacturing and even in retail restaurants.”
Fanuc’s line of delta robots range from the small M-1iA to larger machines, such as the M-2iA and M-3iA. They feature payload capacities of 0.5 to 12 kilograms.
According to Juhasz, the M-1iA family of intelligent “genkotsu” robots are lightweight, compact parallel-link robots for small part handling, high-speed picking, packing and kitting applications. The robot is easy to learn and easy to integrate into assembly lines.
The family includes the M-1iA/0.5A six-axis model; the M-1i A/0.5S and the M-1iA/0.5SL four-axis models; and the M-1iA/1H three-axis model. The unique parallel-link structure provides higher speeds and accuracy compared to traditional handling robots. The robots operate with Fanuc’s latest integrated intelligent functions, such as iRVision, force sensing and Robot Link.
“While delta robots are used in some assembly applications, the recent advancements in delta technology have been primarily geared to the food and beverage, logistics, pharmaceutical and consumer-packaged goods industries,” adds John Bubnikovich, president of ABB’s U.S. robotics division.
“The recent delta innovations that robot OEMs have provided to those industries include increased speed, reach and payload, as well as AI-enabled by vision systems, which gives end-users an ability to recognize and handle a greater variety of products in a more agile and flexible way,” explains Bubnikovich.
The most significant ABB delta robot introduction is the IRB 390 FlexPacker. It is available as a four- and five-axis variant machine. The robot is 35 percent faster than the IRB 360-8/1130 FlexPicker (ABB’s long tenured delta robot series), with a 45 percent increase in reachable volume and payload of up to 15 kilograms.
“Designed for customers in food and beverage, logistics, pharmaceutical and consumer-packaged goods industries, the IRB 390 is ideal for secondary packaging and higher payload applications,” claims Bubnikovich. “It has NSF H1 food-grade lubricants and is built of FDA-compliant material, suitable for use in hygienic environments.”

Delta robots are faster than most serial-link robots and they have small footprints. Photo courtesy ABB Robotics
Super Fast Picking and Placing
When it comes to speed, it’s hard to beat delta robots, which are more than 30 percent faster than SCARA robots. The machines can pick, place and orient parts from an inbound conveyor to an outbound conveyor at more than 180 parts per minute or three parts every second.
Delta robots are built for speed. They use a high-speed motor assembly that drives light weight carbon fiber arms to a high degree of repeatability. However, what they gain in speed they lose in the ability to place objects deep into other objects. Payload capacity is also limited.
End-of-arm tooling plays a critical role in achieving fast speeds. Delta robots require very lightweight tooling with fast actuation, due to their small payload capacity and fast cycle rates. Simple vacuum tooling with suction cups is the most popular type of end-effector.
Mechanical grippers are also used for some applications, but they add mass and inertia to the system, which slows down the robot.
Despite all the speed and throughput advantages, there are some potential drawbacks to delta robots. For instance, moveable area and payload capacity are a few things that engineers should pay attention to.
Delta robots must be mounted to an overhead frame. To expand to a wider work area, engineers need to prepare a taller frame to install the robot. And, it can be difficult to expand payload capacity because of the structure limitation.
“Delta robots are specifically designed to optimize speed with lower payload capacities,” says Joe Campbell, a robotics industry veteran who recently retired as senior manager of strategic marketing and applications development at Universal Robots. One bad thing about them is that the mounting structures are expensive.
“Because they’re moving so fast, you need to have a rigid, stable mount,” warns Campbell. “You can’t just slap it on a table or workstation.”
According to Campbell, with a delta robot, you also don’t have the same accuracy as with a SCARA or a six-axis robot. Typically, they’re better suited for applications that require high throughput, but not high accuracy.”
But, you can still get submillimeter pick-and-place accuracy with a delta robot. It depends on what you’re trying to achieve. If you’re looking for submicron accuracy and can sacrifice some speed, a Cartesian or a SCARA robot would probably be better. To take advantage of the performance benefits of a delta robot, an application should require more than 60 pick-and-place cycles per minute.
Like any other robot, there is always a compromise between payload and speed. Most delta robots are rated with payloads in the 1 to 3 kilogram range. This limits the types of handling applications that the robots can be placed in and the tool designs that the robot can carry.
Full Speed Ahead
Although delta-style robots are becoming more popular, the machines are misunderstood by some engineers.
One common misperception is that delta robots are the best-suited arm for all pick-and-place applications. However, delta robots are generally more expensive than traditional serial-link arms and are limited to small payload applications.
In some cases, where throughput does not demand the super high speed of a delta robot, installing two small serial- link arms may be a more cost-effective solution.”
Integrating vision systems into a packaging or assembly line is critical, so it is important that the delta robot, system controller, configuration software and vision system operate seamlessly with each other.
Typically, with a delta robot, there are parts moving in and moving out on conveyors. When you have a bunch of pieces that are moving at high speeds, it’s a more complex environment than with most six-axis robot applications, where parts are typically stationary. Delta robots also typically require a more sophisticated control scheme.
Despite those limitations, robot vendors continue to develop new types of delta robots for applications where line speed and adaptability are essential.
One recently unveiled product is ABB’s IRB 365 FlexPicker. The five-axis machine has a 1.5 kilogram payload capacity, making it both flexible and designed for reorienting packaged lightweight products. It was developed in response to the rise in e-commerce and the growing demand for shelf-ready packaged goods.
“The IRB 365 can pick, reorient and place 1-kilogram products at 120 picks per minute,” says Roy Fraser, global product manager at ABB Robotics. “Our customers saw that the growth in online shopping was driving the demand for shelf-ready packaged goods, so we developed a new delta robot that would rise to the challenge.
“By handling more products per minute, the IRB 365 robot increases productivity, while saving time and energy to make production more efficient,” claims Fraser. “The [machine] is capable of many tasks, such as product reorienting, top-loading and secondary packaging, bottle handling, unscrambling and 3D picking. It’s powered by the Omnicore C30 controller, which is the smallest delta robot controller on the market.”
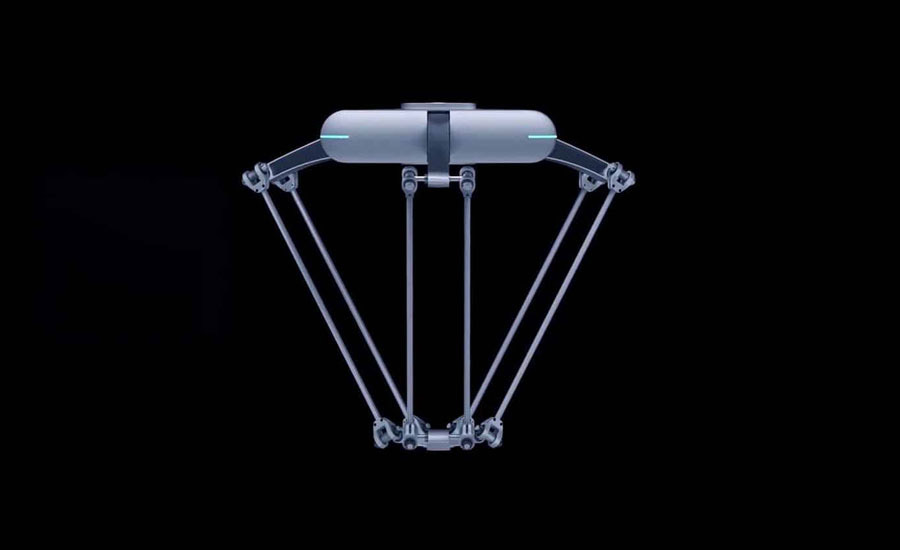
This force-controlled delta robot is designed for applications that require precise motion and force control, such as screwdriving and polishing. Photo courtesy Flexiv
Earlier this year, Flexiv unveiled a force-controlled delta robot called Moonlight. It is designed for applications that require precise motion and force control, such as screwdriving, polishing and ultra-accurate loading.
Incorporating force-control technology, the adaptive parallel robot can precisely measure force down to 0.1 newton, so even delicate objects can be handled. This makes tasks such as polishing and sanding uneven surfaces possible while guaranteeing output quality and practically eliminating workpiece damage.
Repeatable and accurate, Moonlight can be installed at any angle. Artificial intelligence software enables the robot to handle applications that demand flexibility, reliability and adaptability.
“Moonlight is a combination of our award-winning Rizon series of robots and the industry-proven parallel bot design,” says Hao Jiang, director of product development at Flexiv. “We saw that in some specific applications, customers needed a powerful, cost-effective robot that combines highly precise force control with adaptability, so that’s what we built.
“With its increased speed and greater precision, Moonlight boosts production efficiency while retaining a multirole capacity,” adds Jiang.
The KR3 D1200 from Kuka Robotics Corp. is designed for food, medical and electronics applications. It is made from carbon-fiber parts that enable the delta robot to be much lighter and faster than stainless steel machines. With 1-kilogram loads, cycle time is less than 0.32 second.
The robot has a reach of 1,200 millimeters and a vertical working range of 350 millimeters. It features a position repeatability of ±0.1 millimeters and an angular repeatability of ± 0.2 degrees. A small footprint with a diameter of 350 millimeters makes ceiling mounting space-saving and efficient.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!





