advertisement
How To Select a Force/Torque Sensor for Robotic Assembly
The Benefits of Using a Force/Torque Sensor with a Robot
Current robots use a position-based control strategy, which can be ineffective as an assembly tool in applications where the assembly tolerance is less than the positional uncertainty. When an industrial robot is equipped with a force/torque sensor which measures six degrees of freedom (Fx, Fy, Fz, Tx, Ty, and Tz), the interaction forces can be measured, fed back to the robot controller, and used to modify the desired trajectory of the robot. This allows robots to perform assembly tasks such as fitting splined parts together or inserting pistons into bores. Likewise, other tasks such as grinding and deburring often require robots to maintain a constant contact force, allowing them to control the quality of finish and the amount of material removed. Without a sensor, robots cannot monitor and react to the contact forces needed for these tasks.
Choosing the Proper Force/Torque Sensor
Torque capacity is usually the determining factor in choosing the size of the sensor needed for the application. The end-effector attached to the sensor, as well as the tasks being performed, will generate forces on the sensor, which result in the torque load.
A correctly-sized sensor will have sufficient sensing range and resolution to monitor the force and torque loads throughout the robot task. It will also have sufficient overload capability to withstand robot crashes, an inevitable part of programming a robot.
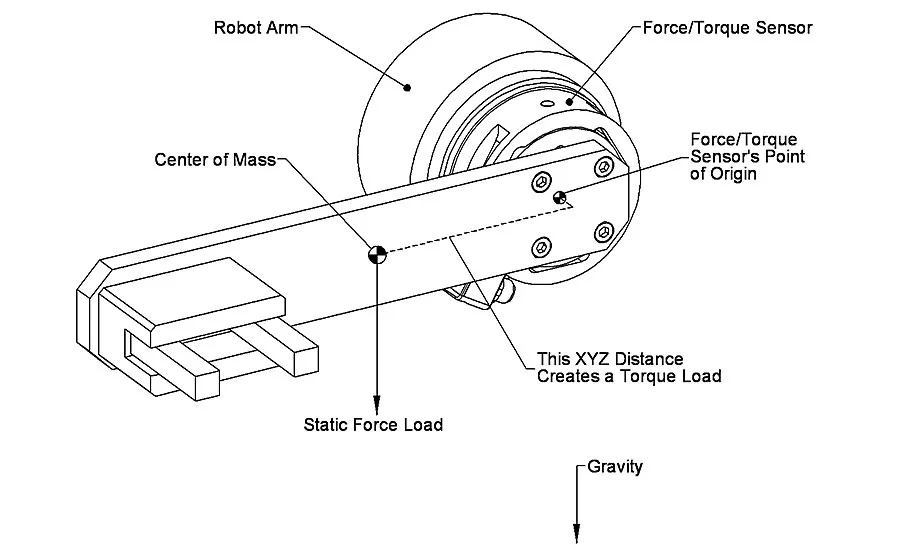
Calculating the Loads
The torque is the force (comprised of the static, dynamic, and working forces) multiplied by the distance from the sensor origin to the point at which the force is applied. It is important to also consider overload conditions beyond the normal operating forces and torques the sensor will experience.
Sensor loading will vary with the orientation of the tooling relative to gravity and the acceleration or deceleration during robot movements. Anticipating the maximum inertial load caused by the robot’s movement may be important to understanding the maximum load presented to the sensor.
Selecting an Appropriately-sized Model
Once the expected loads have been defined, a sensor can be selected. Pick a sensor with a sensing range sufficient to measure the expected force and torque loads and with an overload capacity that can handle any potential robot crashes or emergency stops. A general rule of thumb is to have an overload capacity of at least five times the sensing range.
Selecting the Best Communications Interface
If the robot controller has a force-sensing option, then use the communications interface required by the force-sensing option. If a force-sensing option is unavailable, then select a communications interface that is compatible with the robot I/O options. Examples of commonly available force/torque sensor communications interfaces include Ethernet, EtherNet/IP, DeviceNet, analog voltage, and RS-232 serial.
A robot with a force-sensing option is preferred because its robot programming language provides force-control functions that are optimized for the robot. These optimized functions allow the robot to quickly react to force and torque readings, enabling a greater level of control for demanding tasks such as bearing insertion or valve installation.
Conclusion
Robotic force/torque sensors allow robots to perform difficult tasks such as the assembly of tightly-toleranced parts, assembly of indeterminately-oriented parts (such as gears), and surface finishing. A good understanding of the tooling and part geometry and an idea of the desired level of applied force will facilitate the selection of the correct force/torque sensor.
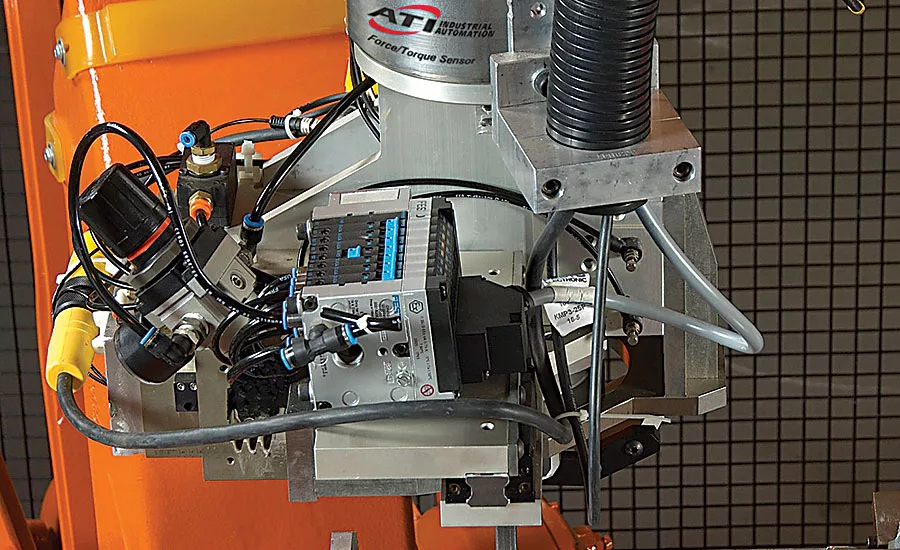
ATI’s Force/Torque Sensor is mounted to the wrist of an ABB industrial robot, providing feedback that gives the robot a sense of touch just as a human would. This allows the robot to make quick adjustments in real-time to search for the correct assembly position as a piston is inserted into the cylinder of an engine block. ATI’s Force/Torque Sensors make it possible to automate difficult assembly tasks which were previously performed manually or required complex assembly machines.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!




