advertisement
How To Select a Robotic Tool Changer

The Purpose of a Robotic Tool Changer
Robotic tool changers provide flexibility to robotic applications by enabling the robot to change end-effectors automatically (e.g.; grippers, vacuum cup tooling, pneumatic and electric motors, weld guns, etc.). Tool changers consist of a master plate, which is mounted to the robot arm, and a tool plate, which is mounted to the end-effector. The tool changer passes utilities such as pneumatics, electrical signals, fluids, and more from the robot arm to the end-effector.
Benefits of Using a Robotic Tool Changer
- Production lines are changed over in seconds instead of hours.
- Tools are quickly changed for maintenance and repair, drastically reducing downtime.
- Flexibility is maximized by using more than one end-effector in an application.
- Tooling is simplified by replacing heavy and large multi-tool end-effectors with individual tools that are automatically exchanged.
Selecting the Proper Robotic Tool Changer
A key feature to look for when selecting a robotic tool changer is a reliable and repeatable locking mechanism to lock the master plate to the tool plate. Another very important feature to consider is a fail-safe mechanism (preferably one that does not use a spring) to ensure the tool stays coupled to the master in the event that air pressure or power is lost. Tool changers have a payload rating which is compared to the weight of the end-effector and the payload capacity of the robot. Selecting a tool changer based on payload alone will provide a starting point, but the most important factor is moment capacity.
Calculating the Static Moment Load
The most accurate selection of a tool changer model is made by calculating the static moment load of the end-effector.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
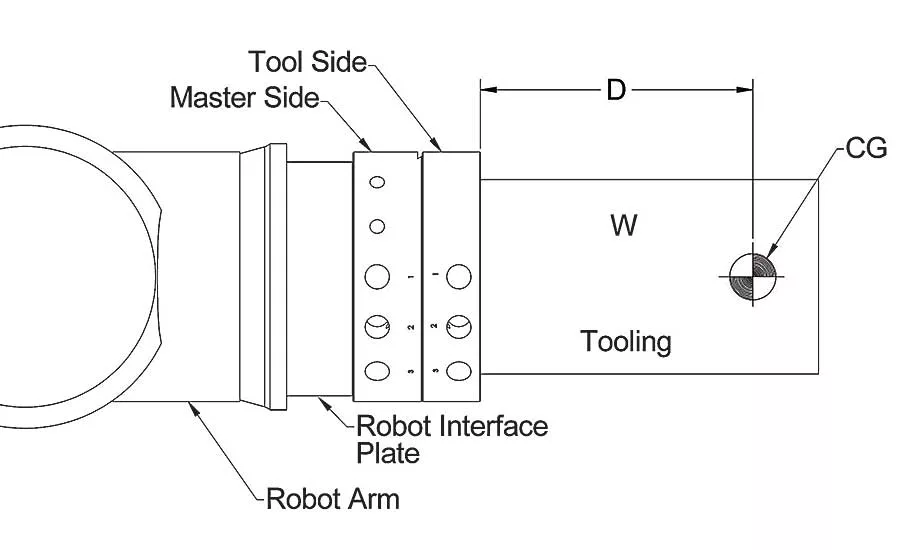
Use the following to approximate the worst-case static moment:
a) Find the approximate center-of-gravity (CG) of the heaviest end-effector to be used.
b) Calculate the distance (D) from the CG to the mounting face of the tool plate (example right).
c) Calculate the weight (W) of the heaviest end-effector.
d) Multiply W by D to get an approximate static moment (M) (or a moment based on one G of acceleration).
e) Select a tool changer with a static moment capacity equal to or greater than M.
Typical robot motion produces moments two to three times higher than the calculated static moment (M) due to their high acceleration. In order to ensure proper functionality and longevity, the selected tool changer must be designed to handle dynamic moments three times higher than their static moment ratings.
Selecting Appropriate Utility Modules and Accessories
Once a tool changer model is selected, it is necessary to determine what utilities must be passed from the robot, through the tool changer, to the end-effector. These may include, but are not limited to: pneumatics, electrical signals, fluids, high power for welding, field bus such as DeviceNet, Ethernet, or PROFINET, servo power and signals, ultrasonic, or hydraulics. Some tool changers are designed to pass utilities through the body, while other utilities are passed through attached modules.
Conclusion
Robotic tool changers save money by increasing robotic productivity and flexibility. They increase run time by facilitating automatic tooling changes and increase manufacturing efficiency. Tool changers minimize downtime by expediting tooling maintenance and replacement. They provide a seamless transition and introduction of new tooling, while minimizing equipment idle time. Selecting a tool changer model and configuration requires application-specific information about the load created by the end-effector and its required utilities. Suppliers can assist with load calculation, tool changer model selection, and utility module selection.
For more information, visit ATI Industrial Automation at www.ati-ia.com
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!




