The Role of Vision in Robotic Dispensing
Vision-guidance can improve the speed and precision of robotic dispensing processes




Manufacturers must consider many factors when deciding which equipment to invest in for fluid dispensing operations.
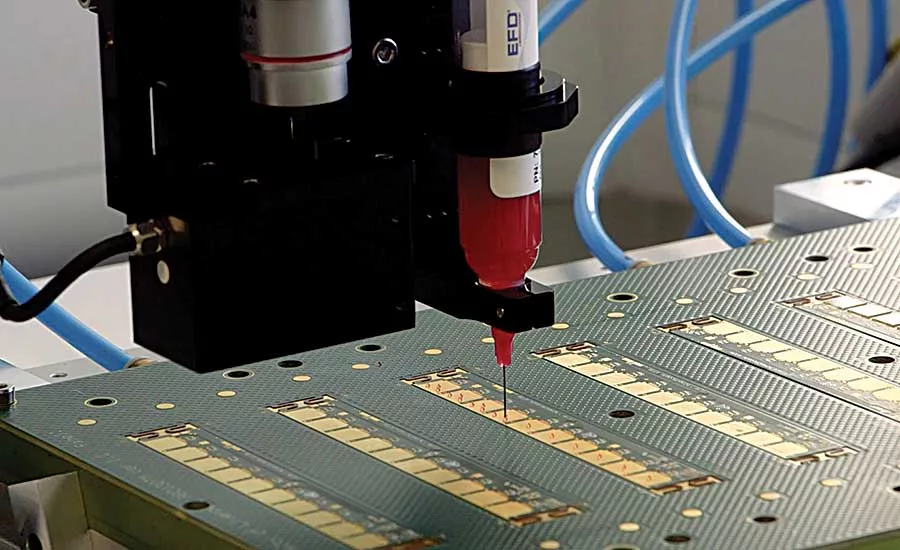
Critical is the need to deposit small, precise amounts of fluid, such as adhesives and sealants, to small assemblies, such as microelectronics. These tiny amounts of fluid must be dispensed reliably and accurately in both dosage and placement. This is vital to the proper assembly, function, quality and appearance of the products.
In addition to precision, the dispensing technology must also meet requirements for throughput, safety and cost efficiency.
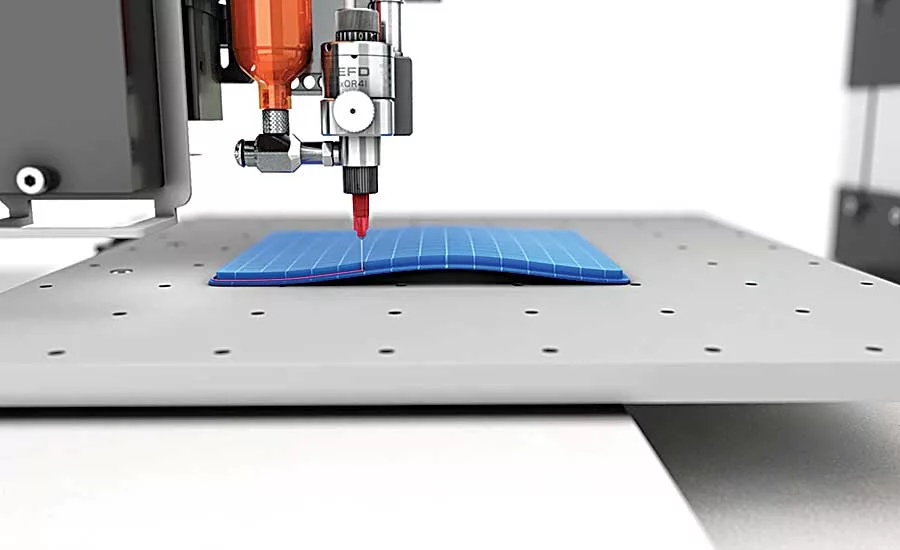
Robots achieve all of these objectives. Robots are flexible, accurate and repeatable. Robotic dispensing optimizes fluid usage, reducing waste and production costs. Software adjusts the positioning of dispensed material automatically to accommodate curves or complex contours, or slight errors in workpiece positioning in the fixture, which would otherwise prove difficult to achieve with non-robotic methods.
Robots can dispense materials with a positional accuracy of ±4 microns. With the right valve and tip, robots can precisely dispense a variety of materials, including greases, epoxies and silicones.
Robotic dispensing software also permits the importing of AutoCAD DXF files, so engineers can program dispensing patterns in their preferred CAD software, then import the DXF file from their software seamlessly into the dispensing platform.
Vision-Guided Dispensing
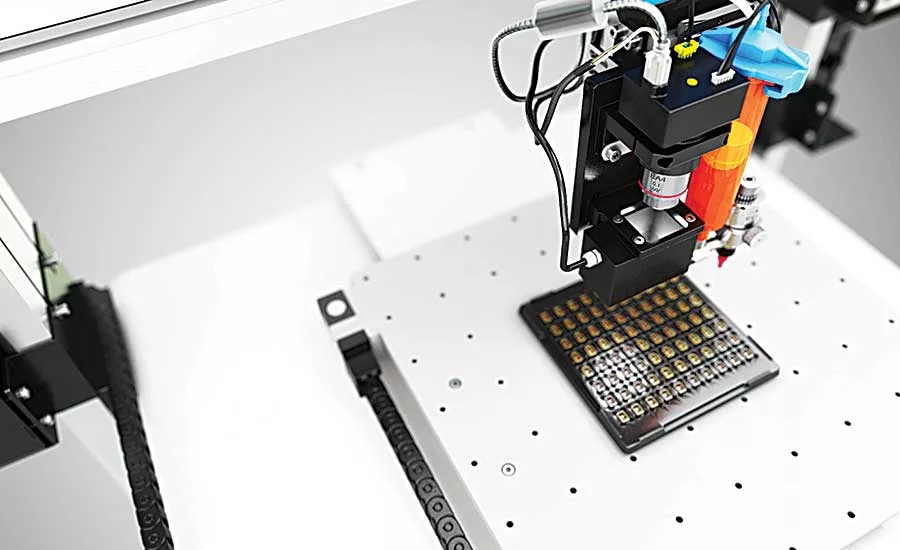
Robots are essential for dispensing applications that require accurate and repeatable deposit placement, complex patterns, or high throughput. Central to this performance is the robot’s vision-guidance system.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
Vision has been used in fluid dispensing applications for more than 20 years, and is becoming more prominent as robots, and their control software, get smarter. It permits robotic dispensing systems to deliver faster production cycles, and it removes the guesswork from the dispensing process, which minimizes programming time and reduces overall operational costs.
Robotic dispensing systems are typically programmed with a teach pendant using the point-to-point method. The operator moves the tip over the substrate location where dispensing is to be targeted. Once the substrate location and coordinates of the X-Y-Z axes have been determined, they are saved in the control software. This process is repeated for all substrate locations where deposition is targeted. The robot will move to these precise locations every time, and dispense fluid as dictated by the fluid dispensing software.
While the point-to-point method is effective, it is time-consuming, and that can be a problem in high-mix, high-volume operations.
The other problem with the point-to-point method is that it does not accommodate slight variations in the position of the parts. The robot will simply go where it was programmed to. If the location of the parts is slightly off, so, too, will be the adhesive deposit.
Vision-guidance is better suited for this situation. A vision system can scan the substrate before dispensing and offset the program if there are any changes to the substrate.
Vision systems for robotic dispensing can vary from simple pencil cameras to sophisticated CCD-equipped vision systems. The defining difference is in the resolution—how many pixels in the camera’s sensor—and the camera’s shutter speed. For most robotic dispensing applications, the pencil camera system is adequate. But if fast, high-resolution photos of the substrate are needed, a CCD camera is required.
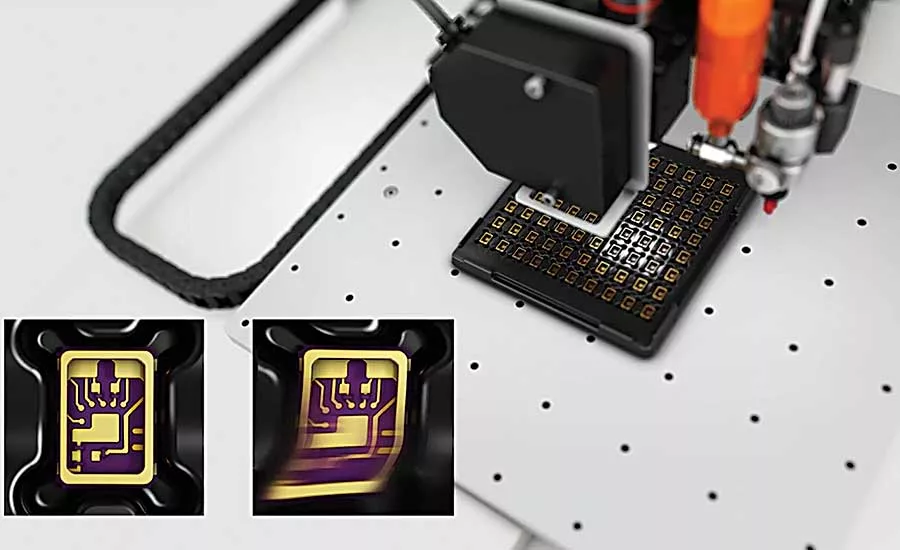
Both cameras function by taking a picture of the substrate, and then applying offsets to the dispensing program to match the location and shape of the robot’s path with the location and shape of the part. More specifically, the camera verifies the location of a part by identifying a distinguishing edge of the part that can be referenced. That reference point will allow the dispensing software to offset the dispensing program if that point changes location—such as if the substrate registration is slightly displaced when positioned in the fixture.
Pencil cameras and CCD cameras both convert analog camera image pixels into digital values for precise image management. Some relatively inexpensive pencil camera systems, combined with specialized dispensing software, such as those offered on Nordson EFD’s EV Series three-axis dispensing robot, allow even first-time users to program complex dispense patterns and arrays with a repeatability of up to ±8 microns.
CCD cameras capture even higher-definition images. Nordson EFD’s PRO Series three-axis dispensing robot is equipped with a CCD camera that can capture detailed images of parts. Shadow enhancement allows the system to discern even faint marks with minimal time interruptions to the dispensing cycle. The camera rapidly captures high-contrast images—eliminating blurriness and small distortions produced by cameras with rolling shutter systems. When paired with a closed-loop motion control system, the camera enables the robot to achieve positional repeatability of ±3 microns.
In addition to a vision system, the PRO Series robot is equipped with a height sensor that detects variations on the surface of a product. The system automatically adjusts the height of the dispensing tip, preventing uneven deposits and damage to the tip or the workpiece.
The height of the needle over the substrate is a key parameter in automated dispensing. The goal is to dispense the material at exactly the right point where the surface tension between the adhesive and the substrate overcomes the surface tension between the adhesive and the needle. Maintaining a consistent gap between the needle and the surface throughout the process prevents stringing and ensures that the dots or beads of material will be the right volume and shape.
If physically touching the board is not feasible, laser height sensing is available for the PRO Series robot as an added option. The laser sensor maps the topography of the substrate and passes those measurements back to the robot so that it can automatically offset the Z-axis values and maintain the correct dispense gap over the substrate. The process can be done in real time for every part, ensuring high-quality dispensing even on warped substrates.
Together, the three technologies—machine vision and contact and noncontact height sensing—simplify the job of programming dots, lines, circles, arcs, compound arcs and complex patterns.
Advanced Software
Nordson EFD’s DispenseMotion software ties the vision system to the robot. The software compares the current location of the workpiece to a reference location that is stored as an image file within the program. When the vision system detects a difference in the X and Y positions or the angle of rotation of the workpiece, the software automatically adjusts the robot’s dispensing path to correct the difference. This offsetting function is constantly receiving data from the vision system to ensure that the dispensing process is executed with precise control.
Despite the software’s advanced capabilities, its intuitive interface simplifies set up and facilitates programming with an on-screen preview of the dispensing path. The tasks of importing and converting DXF files are equally simple. Recently, a Robot Initial Setup Wizard was added to DispenseMotion, making the robots even easier to use by visually steering engineers through each step of the setup process, including calibration and setting of offsets.
This integration of robots with advanced software and vision technology has considerable benefits for manufacturers, including greater production capacity, reduced manufacturing time, consistent accuracy over uneven surfaces, improved product quality, and the ability to take on more complex projects.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!





