Japanese Researchers Create Soft Robotic Microfinger
KYOYO, Japan—Researchers in Japan have developed a soft robotic microfinger that enables interaction with insects through tactile sensing.
Humans have always been fascinated by scales different than theirs, from giant objects, such as stars, planets and galaxies, to the world of the tiny, such as insects, bacteria, viruses and other microscopic objects. While microscopes allow people to view the very small objects, it is still difficult to interact with them directly.
Microrobots might change all that. They can interact with the environment at much smaller scales than people can. Microsensors have been used to measure forces exerted by insects during activities, such as flight or walking. However, most studies so far have only focused on measuring insect behavior rather than a direct insect-microsensor interaction.
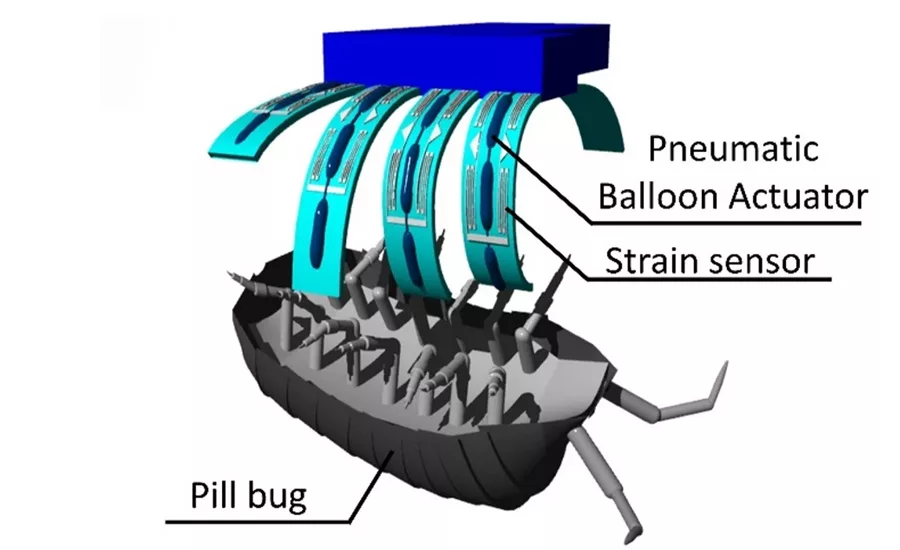
Now, researchers from Ritsumeikan University have now developed a soft micro-robotic finger that can enable a more direct interaction with the microworld. Led by Satoshi Konishi, Ph.D., the researchers developed a soft pneumatic balloon actuator that acts as an artificial muscle, allowing control and finger-like movement of the sensor. With a robotic glove, a human user can directly control the microfingers. This kind of system allows for a safe interaction with insects and other microscopic objects.
Using their newly developed microrobot setup, the research team investigated the reaction force of a pill bug as a representative sample of an insect. The pill bug was fixed in place using a suction tool and the microfinger was used to apply a force and measure the reaction force of the bug’s legs.
The reaction force measured from the legs of the pill bug was approximately 10 millinewtons, which agreed with previously estimated values. While a representative study and a proof-of-concept, this result shows great promise towards realizing direct human interactions with the microworld. Moreover, it can also have applications even in augmented reality (AR) technology. Using robotized gloves and micro-sensing tools, such as the microfinger, many AR technologies concerning human-environment interactions on the microscale can be realized.
“With our strain-sensing microfinger, we were able to directly measure the pushing motion and force of the legs and torso of a pill bug—something that has been impossible to achieve previously. We anticipate that our results will lead to further technological development for microfinger-insect interactions, leading to human-environment interactions at much smaller scales,” says Konishi.Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!



