Assembly Lines
New System Enables Robots to Solve Complex Manipulation Problems
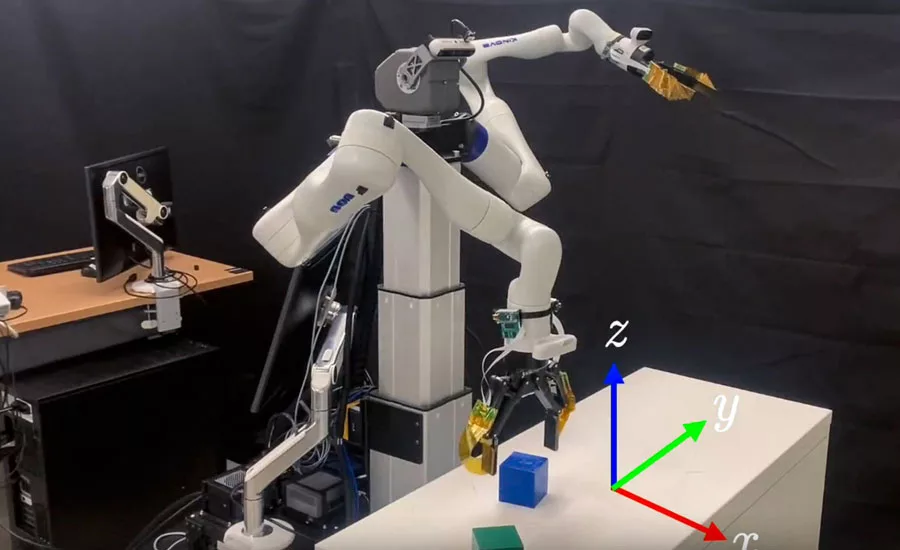
A new robot planning approach considers thousands of possible actions simultaneously, enabling the machine to rapidly determine how to manipulate and tightly pack items, such as these blocks, without damaging them.
Illustration courtesy Massachusetts Institute of Technology
CAMBRIDGE, MA—Engineers at the Massachusetts Institute of Technology (MIT) and Nvidia Research have developed an algorithm that enables robots to think ahead and consider thousands of potential motion plans simultaneously. Instead of testing each potential action one at a time, like many existing approaches, this new method solves multistep manipulation problems in a matter of seconds.
In a factory setting, the technology could enable robots to rapidly determine how to handle parts that have different shapes or sizes without damaging them, knocking anything over or colliding with obstacles.
To enable super-quick decision making, the engineers harnessed the massive computational power of specialized processors called graphics processing units (GPUs). Their algorithm is designed for task and motion planning (TAMP).
“The goal of a TAMP algorithm is to come up with a task plan for a robot, which is a high-level sequence of actions, along with a motion plan, which includes low-level action parameters,” says Caelan Garrett, Ph.D., a senior research scientist at Nvidia Research who worked on the project.
Garrett and his colleagues developed an algorithm called cuTAMP, which is accelerated using a parallel computing platform called CUDA. It simulates and refines thousands of solutions in parallel by combining sampling and optimization.
But, rather than sampling randomly, cuTAMP limits the range of potential solutions to those most likely to satisfy the problem’s constraints. This procedure allows cuTAMP to broadly explore options while narrowing down the sampling space.
Once cuTAMP has generated a set of samples, it performs a parallelized optimization procedure that computes a cost, which corresponds to how well each sample avoids collisions and satisfies the motion constraints of the robot, as well as any user-defined objectives.
Looking for quick answers on assembly and manufacturing topics? Try Ask ASM, our new smart AI search tool. Ask ASM
It updates the samples in parallel, chooses the best candidates, and repeats the process until it narrows them down to a successful solution.
The system works across robot platforms and has been tested on a robotic arm at MIT and a humanoid robot at Nvidia. Since cuTAMP is not a machine-learning algorithm, it requires no training data, which could enable it to be readily deployed in many applications.
“You can give it a brand-new problem and it will probably solve it,” says Garrett. “In the future, [we] want to leverage large language models and vision language models within cuTAMP, enabling a robot to formulate and execute a plan that achieves specific objectives based on voice commands from a user.”
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!









